| 6. Ausgewaehlte Kapitel im Euklid. Raum zurück |
6.0 Ausgangspunkt
->6.1
->Inhalts.Verz.
Im Kontext dieser Abhandlungen unterscheiden wir zwei Arten von Räumen:
1. lokaler Raum unserer Anschauung. Elemente sind: Objekte, Objekt-Eigenschaften, Wechselwirkungen, Ereignisse u.ä. im (beobachtbaren) 'Universum'.
Untersuchungs-Methoden sind: Mechanik (Newton'sche Axiomatik), Elektrodynamik, Relativitätsprinzip u.a. Weitere Bezeichnungen für den 'lokalen Raum' sind: 'phys.Raum' oder 'Newton Raum'
2. Abstrakter (math.) Raum. Elemente sind: Zahlen, m-Tupel von Zahlen und im weiteren Sinn: "Abstrakte math. Objekte", mit denen man "rechnen" kann.
Allen Räumen ist gemein, daß sie über eine Verknüpfungs-Axiomatik ihrer Elemente charakterisiert werden.
Damit eine Verbindung (Assoziierung) zwischen beiden Räumen hergestellt werden kann, wird ein abstrakter "Mengen-Begriff" eingeführt, (Menge von Elementen), und wie folgt verwendet:
Einer Menge M wird durch Indexierung ihrer Elemente E eine Folge-Eigenschaft zugeordnet: M={E(i)}, i=1,2,... Die Indizes repräsentieren dann eine Abbildung in die Menge der "natürlichen Zahlen", dem einfachsten math. Raum. Über die verschiedenen Abstraktions-Stufen, siehe 'Dok.3_1: Modell der reellen Zahlen' , erhält man einen konkreten Zahl-Raum, nämlich, den Raum der "reellen Zahlen", symb.: R={r}, r=reell, mit dessen Elementen man nun alle bekannten Rechen-Operationen durchführen kann.
Wird die Menge der reellen Zahlen zu der Menge aller m-Tupel reeller Zahlen, {r1,....,rm}, ri=reell erweitert, so bezeichnen wir diesen Menge als "(abstrakter) Euklid. Raum", symb.: Rm (R1=Menge der reellen Zahlen).
Beispiel: Die Ort-Eigenschaft von Körpern (Massen) im lokalen Raum kann den Punkten (Elementen) des R3 zugeordnet werden, und die zugehörige Temperatur-Eigenschaft einer reellen Zahl im R1.
Verknüpfungs-Axiomatik für die Elemente des Rm:
- Add/Sub: p1±p2=((x1±y1),...,(xm±ym))
- Mult/Div: nicht definiert!(außer R1)
- Mult. mit reeller Zahl: λp1=(λx1,...,λxm)
- Lin.-Komb.: L(p1,..,pn)= a1p1 +...+anpn
Definition spez. Verknüpf.:
- Len: Len(p1-p2)= -Len(p2-p1) ,±Länge einer Richtung
- Skapro: <p1,p2> = x1*y1+...+ xm*ym
- Norm: Norm(p1)= (+)Sqrt(Skapro(p1,p1))
- Metrik: d(p1,p2)= Norm(p1-p2)=(+)Sqrt((x1-y1)²+...+(xm-ym)²)
Diese 'Metrik' wird auch als "Euklid.Abstand" bezeichnet.
- Volumenprodukt: Vol(p1...pm)= Det(p1...pm)
- Flächenprodukt: F(p1*p2)= -F(p2*p1)
F() ist die orientierte Fläche des von p1,p2 aufgespannten Parallelogramm im Rm.
Beachte: Da die Elemente des Rm (auch) Richtungen sind, werden
die Verknüpfungen bei Richtungswechsel, also p1=-(-p1), mit (-1) multipliziert. Dies gilt auch
bei Vertauschung 2-er Elemente (ausser Add, Skapro, Norm, Metrik ).
Koordinaten-Systeme:
Koord.Basis ist E={e1,...em} , ej=(0,..,1,..,0);(1 an der j-ten Stelle)
E ist eine Menge von m Richtungen der Länge=1, die auf den zugehörigen Koord.Achsen liegen, also:
ej= (Null-->ej)= (ej-Null) ; ej= xj/Len(xj,0)(bei xj≠Null) .
In der geometrischen Assoziierung werden die {ej} als paarweise rechtwinklig gedeutet, also:
i≠j : Skapro(ei, ej)=0 ,F(ei, ej)=±1
i=j : Skapro(ei, ei)=1 ,F(ei, ei)=0
Dieses Basis-System E wird auch als 'karth.-Koord.-System' bezeichnet.
Alle Verknüpfungen können sowohl in der Koeffizienten-Schreibweise (ohne ei) geschrieben werden (skalare Schreibweise), als auch in der Lin.-Komb.-Schreibweise (mit ei), sogenannte "Richtungs-/Vektor-Schreibweise" .
Beginnen wollen wir mit der Mittel-/Schwerpunkt-Berechnung.
Im Kontext dieser Abhandlungen unterscheiden wir zwei Arten von Räumen:
1. lokaler Raum unserer Anschauung. Elemente sind: Objekte, Objekt-Eigenschaften, Wechselwirkungen, Ereignisse u.ä. im (beobachtbaren) 'Universum'.
Untersuchungs-Methoden sind: Mechanik (Newton'sche Axiomatik), Elektrodynamik, Relativitätsprinzip u.a. Weitere Bezeichnungen für den 'lokalen Raum' sind: 'phys.Raum' oder 'Newton Raum'
2. Abstrakter (math.) Raum. Elemente sind: Zahlen, m-Tupel von Zahlen und im weiteren Sinn: "Abstrakte math. Objekte", mit denen man "rechnen" kann.
Allen Räumen ist gemein, daß sie über eine Verknüpfungs-Axiomatik ihrer Elemente charakterisiert werden.
Damit eine Verbindung (Assoziierung) zwischen beiden Räumen hergestellt werden kann, wird ein abstrakter "Mengen-Begriff" eingeführt, (Menge von Elementen), und wie folgt verwendet:
Einer Menge M wird durch Indexierung ihrer Elemente E eine Folge-Eigenschaft zugeordnet: M={E(i)}, i=1,2,... Die Indizes repräsentieren dann eine Abbildung in die Menge der "natürlichen Zahlen", dem einfachsten math. Raum. Über die verschiedenen Abstraktions-Stufen, siehe 'Dok.3_1: Modell der reellen Zahlen' , erhält man einen konkreten Zahl-Raum, nämlich, den Raum der "reellen Zahlen", symb.: R={r}, r=reell, mit dessen Elementen man nun alle bekannten Rechen-Operationen durchführen kann.
Wird die Menge der reellen Zahlen zu der Menge aller m-Tupel reeller Zahlen, {r1,....,rm}, ri=reell erweitert, so bezeichnen wir diesen Menge als "(abstrakter) Euklid. Raum", symb.: Rm (R1=Menge der reellen Zahlen).
Beispiel: Die Ort-Eigenschaft von Körpern (Massen) im lokalen Raum kann den Punkten (Elementen) des R3 zugeordnet werden, und die zugehörige Temperatur-Eigenschaft einer reellen Zahl im R1.
Verknüpfungs-Axiomatik für die Elemente des Rm:
- Add/Sub: p1±p2=((x1±y1),...,(xm±ym))
- Mult/Div: nicht definiert!
- Mult. mit reeller Zahl: λp1=(λx1,...,λxm)
- Lin.-Komb.: L(p1,..,pn)= a1p1 +...+anpn
Definition spez. Verknüpf.:
- Len: Len(p1-p2)= -Len(p2-p1) ,
- Skapro: <p1,p2> = x1*y1+...+ xm*ym
- Norm: Norm(p1)= (+)Sqrt(Skapro(p1,p1))
- Metrik: d(p1,p2)= Norm(p1-p2)=
Diese 'Metrik' wird auch als "Euklid.Abstand" bezeichnet.
- Volumenprodukt: Vol(p1...pm)= Det(p1...pm)
- Flächenprodukt: F(p1*p2)= -F(p2*p1)
F() ist die orientierte Fläche des von p1,p2 aufgespannten Parallelogramm im Rm.
Koordinaten-Systeme:
Koord.Basis ist E={e1,...em} , ej=(0,..,1,..,0);
E ist eine Menge von m Richtungen der Länge=1, die auf den zugehörigen Koord.Achsen liegen, also:
ej= (Null-->ej)= (ej-Null) ; ej= xj/Len(xj,0)
In der geometrischen Assoziierung werden die {ej} als paarweise rechtwinklig gedeutet, also:
i≠j : Skapro(ei, ej)=0 ,F(ei, ej)=±1
i=j : Skapro(ei, ei)=1 ,F(ei, ei)=0
Dieses Basis-System E wird auch als 'karth.-Koord.-System' bezeichnet.
Alle Verknüpfungen können sowohl in der Koeffizienten-Schreibweise (ohne ei) geschrieben werden (skalare Schreibweise), als auch in der Lin.-Komb.-Schreibweise (mit ei), sogenannte "Richtungs-/Vektor-Schreibweise" .
Bemerkung:
Die Wechselwirkung zwischen 'Newton-Raum' und 'Eukl.-Raum' wird in den nachf. Abschnitten durch den Begriff "geometr.Assoziierung" deutlich gemacht.
Das Besondere ist, daß viele math.Methoden erst durch die "geometr.Assoziierung" entwickelt wurden und somit dann sinnvoll, sowie plausibel erscheinen. Dies betrifft insbesondere die in den Abschnitten der "analyt.Geometrie" angesprochenen Gebiete:
- Koordinaten-Transformation
- lineare Abbildungen
- Fundamental-Folgen /finite-Elemente
- Differenzierungs- /Integrations-Prozess
- Auflösungs-Theorie
Beispiele für Assoziierung:
- Produkt a*b =Flächeninhalt
- Quotient a/b =An-/Abstieg /Winkel
- Tupel (ei, ej) 2-er karth.Basis-Koord. werden als rechtwinklig zueinander gedeutet.
Die Wechselwirkung zwischen 'Newton-Raum' und 'Eukl.-Raum' wird in den nachf. Abschnitten durch den Begriff "geometr.Assoziierung" deutlich gemacht.
Das Besondere ist, daß viele math.Methoden erst durch die "geometr.Assoziierung" entwickelt wurden und somit dann sinnvoll, sowie plausibel erscheinen. Dies betrifft insbesondere die in den Abschnitten der "analyt.Geometrie" angesprochenen Gebiete:
- Koordinaten-Transformation
- lineare Abbildungen
- Fundamental-Folgen /finite-Elemente
- Differenzierungs- /Integrations-Prozess
- Auflösungs-Theorie
Beispiele für Assoziierung:
- Produkt a*b =Flächeninhalt
- Quotient a/b =An-/Abstieg /Winkel
- Tupel (ei, ej) 2-er karth.Basis-Koord. werden als rechtwinklig zueinander gedeutet.
Beginnen wollen wir mit der Mittel-/Schwerpunkt-Berechnung.
Diese Abhandlung besteht aus folgenden Abschnitten:
6.0
Ausgangspunkt
->6.0
6.1
Mittel-/Schwerpunkt-Berechnung im Rm
->6.1
6.1a
Mittelpunkt von {fj,pj}
->6.1a
6.2
Koordinaten-Transformation
->6.2
6.3
Allg. Koordinaten-Transformation im Rm
->6.3
6.4
Spezielle Koord.Transformation im R2
->6.4
6.4a
Additions Theoreme für cos(a+b) und sin(a+b)
->6.4a
6.5
Funktionen-Reihen
->6.5
6.6
Potenz-Reihe für cos() und sin()
->6.6
6.7
Rechnen mit komplexen Zahlen z ,Funktionalgleichung für z
->6.7
6.8
Diff.Quotienten im Rm ,Mittelwertsatz , Taylor-Entw. ,totales Differential
->6.8
6.9
Diff.Quotienten höherer Ordnung ,Taylor-Entwickl. für f(x1,x2...)
->6.9
6.10
Linearisierung von f in x° ,Beispiel Tangente an Kreis
->6.10
6.11
Linearisier. kompl. f() ,Mittelwertsatz, holomorphe f(), Potenzr.-Entw.
->6.11
6.12
Komplexe Ableitung in geometr. Assoziierung
->6.12
6.1 Mittel-/Schwerpunkt-Berechnung im Eukl.Raum:
Begriffsbildung und Sachverhalt:
Bei den Begriffen: Mittel- /Gleichgewichts- /Schwer- Punkt etc. handelt es sich im Allgemeinen immer um den gleichen Sachverhalt, nämlich:
Berechnung des gewichteten Mittels einer Element-Folge:
M={fj*pj} , fj=reelle Zahlen.
Dieses gew.Mittel, (sogenannt, weil in der Folge M{} Ort-Koordinaten p mit einem "Gewicht/Faktor"=f multipliziert werden), wird dann im gegebenen Quell-Kontext unterschiedlich gewertet, als zB.:
- Mittelpunkt oder Schwerpunkt
- arithmetisches Mittel (nur bei Folgen im R1)
- Gleichgewicht bei stat.Momenten
- Geschlossene Richtungs-Polygon-Züge ( Sum(di)=0 )
Dieser Sachverhalt wird nachfolgend am Beispiel 2-er Elemente beschrieben.
Mittelpunkt zweier Elemente p1,p2:
Sind nur die Ort-Koord. zu vermitteln, (alle f gleich oder =1), dann wird ein Punkt x auf der Geraden duch (p1,p2) gesucht, so dass die jeweiligen Abstände (Richtungs-Diff.) der Punkte zu x gleich sind.
Sind p1 und p2 zusätzlich noch mit einem Faktor gewichtet, so werden 2 Rechteck-Flächen gesucht, f(*p1-x) und g*(p2-x), die von der Fläche=F() her gleich sind,, also: f(p1-x)+g(p2-x)=0.
==> Gl.1.1: f*p1 +g*p2 -(f+g)*x=0
Bemerkung: Da es sich bei Punkt-Differenzen, z.B. (p1-x), um Richtungen handelt, werden Produkte von reellen Zahlen * Richtung auch als 'stat.Moment' bezeichnet, welches betragsmäßig einer Rechteck-Fläche entspricht. Sind p1,p2 reelle Zahlen, z.B. Koord. der Punkte, so vereinfacht sich Gl.1.1 zu dem bekannten arithmetischen Mittel:
x =(f*p1 +g*p1/(f+g) , f,g,p1,p2 reell
Sind die Punkte gleichgewichtet : f=g oder neutral-gewichtet: f=g=1, dann gilt: x=(p1+p2)/2
Gewichtetes Mittel p1,p2:
Bild , Temp-niv1.jpg
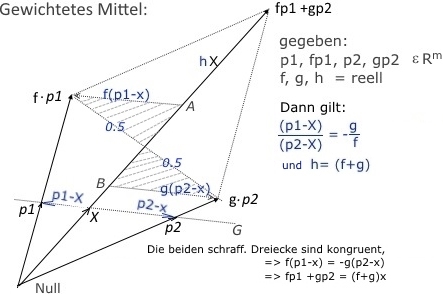
Alle Punkte p1,p2,fp1,gp2,Null liegen in einer Ebene.
Die 4 Dreiecke: D1=(0,x,p1) ,D1a=(0,A,fp1)
und D2=(0,x,p1) ,D2a=(0,B,gp2) sind paarweise aehnlich:
D1a =f*D1 und D2a =g*D2
Auch fuer die zu (p1-x) parallele Richtung (fp1-A) gilt dann (fp1-A) =f(p1-x).
Die Diagonalen des Parallelogramms schneiden sich in der Mitte. Dadurch sind die schraff.Dreiecke kongruent(1 Seite gleich und alle Winkel). Dadurch sind auch die beiden Richtungen f(p1-x) und g(p2-x) gleich (bis auf Vz.).
Also gilt: f(p1-x) +g(p2-x) =Null
x liegt allg. nicht in der Mitte von (p1-p2)
(p1-x)= [(f+g)*p1 -(f*p1+g*p2)]/(f+g)
= g*(p1-p2) /(f+g)
(p2-x)= [(f+g)*p2 -(f*p1+g*p2)]/(f+g)
= f*(p2-p1) /(f+g)
Aus (p1-x)/(x-p2) = g/f folgt:
Gl.1.2: f*(p1-x) = g*(x-p2) Der Mittelpunkt(Schwerpunkt) verschiebt sich in Richtung groesseres Gewicht, (hier f)!
Wichtig: Neben den Gewichten f,g der Punkte p1,p2 hat natürlich auch der Pkt. x ein neues Gewicht, nämlich h=(f+g). (f+g)*x ist dann als neuer, gewichteter Punkt zu verwenden, in Ersetzung des Punkte-Systems {f*p1, g*p2}.
Bemerkung: Gl.1.2 drueckt eine Form der Hebel-Gesetze aus: "Last*Lastarm = Kraft*Kraftarm"
Mittelpunkt mehrerer Elemente p1,p2,...:
Die Elemente mit den Orten {p1,p2,...} haben die Gewichte {f1,f2,...}
p' sei dann der Ort des gew.Mittel (Schwerpunkt) von f1*p1,f2*p2. p' hat dann das Gesamtgewicht der Pkte. p1,p2 als Gewichtung fuer weitere Berechnungen p'=(f1+f2)*p'.
Iterativ: Wird ein weiterer Pkt. z.B. f3*p3, mit (f1+f2)*p' gemittelt, so ergibgt sich als neuer gew.Mittelpunkt:
p''=((f1+f2)*p' +f3*p3) /(f1+f2+f3)p' durch (f1*p1 + f2*p2) / (f1+f2) ersetzen
p''= (f1*p1 +f2*p2 +f3*p3*) /(f1+f2+f3)
Weitere Mittlungen mit p'' vornehmen usw.
Allg. fuer n-Elemente: m= Sum(fi*pi)/Sum(fi)
Bei den Begriffen: Mittel- /Gleichgewichts- /Schwer- Punkt etc. handelt es sich im Allgemeinen immer um den gleichen Sachverhalt, nämlich:
Berechnung des gewichteten Mittels einer Element-Folge:
M={fj*pj} , fj=reelle Zahlen.
Dieses gew.Mittel, (sogenannt, weil in der Folge M{} Ort-Koordinaten p mit einem "Gewicht/Faktor"=f multipliziert werden), wird dann im gegebenen Quell-Kontext unterschiedlich gewertet, als zB.:
- Mittelpunkt oder Schwerpunkt
- arithmetisches Mittel (nur bei Folgen im R1)
- Gleichgewicht bei stat.Momenten
- Geschlossene Richtungs-Polygon-Züge ( Sum(di)=0 )
Dieser Sachverhalt wird nachfolgend am Beispiel 2-er Elemente beschrieben.
Mittelpunkt zweier Elemente p1,p2:
Sind nur die Ort-Koord. zu vermitteln, (alle f gleich oder =1), dann wird ein Punkt x auf der Geraden duch (p1,p2) gesucht, so dass die jeweiligen Abstände (Richtungs-Diff.) der Punkte zu x gleich sind.
Sind p1 und p2 zusätzlich noch mit einem Faktor gewichtet, so werden 2 Rechteck-Flächen gesucht, f(*p1-x) und g*(p2-x), die von der Fläche=F() her gleich sind,, also: f(p1-x)+g(p2-x)=0.
==> Gl.1.1: f*p1 +g*p2 -(f+g)*x=0
Bemerkung: Da es sich bei Punkt-Differenzen, z.B. (p1-x), um Richtungen handelt, werden Produkte von reellen Zahlen * Richtung auch als 'stat.Moment' bezeichnet, welches betragsmäßig einer Rechteck-Fläche entspricht. Sind p1,p2 reelle Zahlen, z.B. Koord. der Punkte, so vereinfacht sich Gl.1.1 zu dem bekannten arithmetischen Mittel:
Sind die Punkte gleichgewichtet : f=g oder neutral-gewichtet: f=g=1, dann gilt: x=(p1+p2)/2
Gewichtetes Mittel p1,p2:
Alle Punkte p1,p2,fp1,gp2,Null liegen in einer Ebene.
Die 4 Dreiecke: D1=(0,x,p1) ,D1a=(0,A,fp1)
und D2=(0,x,p1) ,D2a=(0,B,gp2) sind paarweise aehnlich:
D1a =f*D1 und D2a =g*D2
Auch fuer die zu (p1-x) parallele Richtung (fp1-A) gilt dann (fp1-A) =f(p1-x).
Die Diagonalen des Parallelogramms schneiden sich in der Mitte. Dadurch sind die schraff.Dreiecke kongruent(1 Seite gleich und alle Winkel). Dadurch sind auch die beiden Richtungen f(p1-x) und g(p2-x) gleich (bis auf Vz.).
Also gilt: f(p1-x) +g(p2-x) =Null
x liegt allg. nicht in der Mitte von (p1-p2)
(p1-x)= [(f+g)*p1 -(f*p1+g*p2)]/(f+g)
= g*(p1-p2) /(f+g)
(p2-x)= [(f+g)*p2 -(f*p1+g*p2)]/(f+g)
= f*(p2-p1) /(f+g)
Aus (p1-x)/(x-p2) = g/f folgt:
Gl.1.2: f*(p1-x) = g*(x-p2) Der Mittelpunkt(Schwerpunkt) verschiebt sich in Richtung groesseres Gewicht, (hier f)!
Wichtig: Neben den Gewichten f,g der Punkte p1,p2 hat natürlich auch der Pkt. x ein neues Gewicht, nämlich h=(f+g). (f+g)*x ist dann als neuer, gewichteter Punkt zu verwenden, in Ersetzung des Punkte-Systems {f*p1, g*p2}.
Bemerkung: Gl.1.2 drueckt eine Form der Hebel-Gesetze aus: "Last*Lastarm = Kraft*Kraftarm"
Mittelpunkt mehrerer Elemente p1,p2,...:
Die Elemente mit den Orten {p1,p2,...} haben die Gewichte {f1,f2,...}
p' sei dann der Ort des gew.Mittel (Schwerpunkt) von f1*p1,f2*p2. p' hat dann das Gesamtgewicht der Pkte. p1,p2 als Gewichtung fuer weitere Berechnungen p'=(f1+f2)*p'.
Iterativ: Wird ein weiterer Pkt. z.B. f3*p3, mit (f1+f2)*p' gemittelt, so ergibgt sich als neuer gew.Mittelpunkt:
p''=((f1+f2)*p' +f3*p3) /(f1+f2+f3)
p''= (f1*p1 +f2*p2 +f3*p3*) /(f1+f2+f3)
Weitere Mittlungen mit p'' vornehmen usw.
Bemerkung:
In der allg. Schwerpunkt-Gleichung: m= Sum(fi*pi)/Sum(fi)
bedeutet 'm' die Koord. des Mittel-Pkt. im Rm und Sum(fi) das Gesamtgewicht aller in die Berechnung einbezogener Punkte, welches jetzt auf der Koord. 'm' lastet!.
Dies ist also das Newton'sche Prinzip, Koerper bzw. Massen zur Berechnung durch ihre Massen- Mittelpunkte zu ersetzen.
In der allg. Schwerpunkt-Gleichung: m= Sum(fi*pi)/Sum(fi)
bedeutet 'm' die Koord. des Mittel-Pkt. im Rm und Sum(fi) das Gesamtgewicht aller in die Berechnung einbezogener Punkte, welches jetzt auf der Koord. 'm' lastet!.
Dies ist also das Newton'sche Prinzip, Koerper bzw. Massen zur Berechnung durch ihre Massen- Mittelpunkte zu ersetzen.
6.1a Mittelpunkt von Folgen {fj,pj}
Die Koord. der allg. Schwerpunkt-Gleichung, siehe zuvor, lauten für die Punkte
pi=(ai,1,...,ai,m), i=1...n :
Sum(fi)*m(m1,..., mm) =
f1*(a1,1, ... ,a1,m)
+ f2*(a2,1, ... ,a2,m)
+ . . . . . . .
+ fn*(an,1, ... ,an,m)
Koord. sind Spalten j=1...m , m=( m1,..., mm):
mj= (f1a1,j +f2a2,j + ... +fnan,j) /Sum(fi)
Geometrische Interpretation der Schwerpunkt-Gleichung:
Sei X=(ai,1,...,ai,m) der Schwerpunkt, dann folgt:
Sum(fi*pi) -Sum(fi)*X =0
=> Sum(fi*pi) -Sum(fi*X) =0 =>
Gl.1: Sum(fi*(pi - X))=0
Das unterstrichene Produkt in der Summierung wird nun als Flächeninhalt eines orientierten Rechteckes, mit Seiten fi und pi - X), interpretiert:
Fi= fi*(pi - X) , Fi= ± reelle Zahl daraus folgt:
Satz 1:
Die Summe der Flächenmomente zwischen den (gewicht.) Punkten einer Punktfolge und ihrem Schwer- oder Mittelpunkt ist Null.
unendl.(stetige) Pkt.-Folgen:
{ (f1,a),(f2,b) } sei Punktfolge im R1, also fi, a, b reell.
Dann nehmen wir eine schrittweise Teilung des Intervall d=(b-a) sodass sich X in der n-ten Teilungsstufe wie folgt ergibt:
Sum(k: f(k+1)*[a + k*d/n - X] ) =0 ,n>0 ;k=0,1,..n
In den Teilungsstufen ergeben sich folg. Pkt.Folgen:
n=1: {f1a +0, f2a+1*d/1 }
= {f1a , f2b}
n=2: {f1a+0, f2a+1*d/2 , f3a+2*d/2 } = {f1a , f2a+1*d/2 , f3b}
. . . . . . .
n=n: {f1a+0, f2a+1*d/2 , . . . , f(n+1)a+n*d/n } = {f1a , f2a+1*d/2 , . . . , f(n+1)b}
Sind alle fj const., z.B. =1, dann folgt:
Gl.2:
a*Sum(j: fj=1) +Sum(j: 1 * j*d/n) -Sum(j: 1)*X =0
n natürl.Zahl>1 , j=0,1,...,n
Die Summier. von 1 ergibt (n+1), die Summier. von (j*d/n)
ergibt: 1/2*n²(n+1)*d/n ,
so daß sich aus Gl.2 zur Bestimmung von X ergibt:
a(n+1) +1/2*n²(n+1)*d/n -(n+1)*X=0,kürzen:
a +d/2 =X , diese Gl. für den Schwerpunkt ist unabhängig von dem Index "n" und somit auch für n→∞ gültig, also für unendl.virle Punkte zwischen a und b.
Jetzt ist noch zu zeigen, dass die bei der Teilung entstehenden unendl. vielen Punkte so dicht liegen, dass sie einer reellen Variablen zwischen a und b entsprechen.
Bild , Analysis1_5.jpg
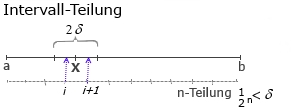
Satz 2: ,Siehe Bild zuvor
Gegeben Intervall (a-b)=d und ein reelles X , a<X<b.
Liegen in jeder δ-Umgebung Uδ(X) eines beliebigen Punktes X , a<X<b unendl.viele weitere Punkte Pi= a+i*d/n , i=0,1,...,n ,beim Grenzübergang
n→∞ , dann handelt es sich bei der Menge:
Lim(i→∞: {Pi}) , um reelle Zahlen!
Beweis:
Uδ(X) bedeutet: abs(p-X)<δ ,δ>0 so vorgegeben, dass Uδ(X) ganz innerhalb des Intervalls (a,b) liegt.
Jetzt wird eine Teilung "n" so gewählt, dass (1/2n)*d<δ ist. Dann gibt es einen Index i, so dass die zwei Punkte:
Pi= a+(i/2n)*d und P(i+1)= a+((i+1)/2n)*d ,i<2n
innerhalb der Uδ(X) liegen.
Dann sind alle Folgepunkte:
Pik= a+(i/2n +1/2k )*d kleiner P(i+1) , für k>n .
a) P(i+1) -Pi = (i/2n +1/2n -i/2n)*d = d/2n <δ nach obiger Voraussetzung.
b) Für Folgepunkte Pik gilt Pik<P(i+1) :
a +(i/2n +1/2k)*d < a +(i/2n +1/2n)*d
=> 1/2k < 1/2n ,für k>n
c) Beim Grenzübergang k→∞ hat man unendl.viele (Folge)Punkte in der Uδ(X). Qed.
Diskrete Variable zu stetiger Variable:
1. Hat man eine diskrete Folge von Punkten, so betrachtet man jedes Intervall (Pi, Pi+1) , i=0,1,...,n-2 für sich und wendet den
vorigen Satz 2 an. Fazit: Jede Folge von reellen Zahlen ist zunächst eine diskrete Variable,
die durch Anwendung des Satzes 2 zu einer stetigen, reellen Variablen wird.
2. Werden die fi mit in den Grenzübergang einbezogen, so wird aus der diskreten Funktion f() einer diskreten Variablen, eine reelle Funktion f(x) einer reellen Variablen x, im Intervall a,b.
Beispiel für Mittelpunkt f(x) , a<x<b :
Die Summenformel für Schwerpkt.X, siehe Gl.1 stellt sich in diesem Kontext wie folgt dar:
(f0*0Δx +f1*1Δx +...+ fn*nΔx)
- (f0*1Δx +f1*1Δx +...+ fn*1Δx)*X =0
Im Grenzübergang werden die Faktoren 0,1,2,3,... ,die den Fortschritt der Punkte Pi darstellen, zur Variablen x mit den entspr. Funktionswerten f(x), so dass man die Summen umschreiben kann: Sum(n→∞, f(x)*x) und Sum(n→∞, f(x)).
Beide Summen stellen im Grenzübergang Δx→0, bestimmte Integrale dar:
∫[a→b, f(x)*x*dx] und ∫[a→b, f(x)*1*dx] .
Sind alle fi=const. z.B.=1 ,dann ist:
(1) ∫[a→b, 1*x*dx]= b²/2 -a²/2 und
(2) ∫[a→b, 1*1*dx]= (b-a)
Schwerpkt.X= (b² -a²)/2= (b+a)*(b-a)/2 -(b-a)*X =0
=> (b+a)*1/2 -1*X =0 => (a+b)/2 = X
Ende Beispiel
Sum(fi)*m(m1,..., mm) =
f1*(a1,1, ... ,a1,m)
+ f2*(a2,1, ... ,a2,m)
+ . . . . . . .
+ fn*(an,1, ... ,an,m)
Koord. sind Spalten j=1...m , m=( m1,..., mm):
mj= (f1a1,j +f2a2,j + ... +fnan,j) /Sum(fi)
Geometrische Interpretation der Schwerpunkt-Gleichung:
Sei X=(ai,1,...,ai,m) der Schwerpunkt, dann folgt:
Sum(fi*pi) -Sum(fi)*X =0
=> Sum(fi*pi) -Sum(fi*X) =0 =>
Gl.1: Sum(fi*(pi - X))=0
Das unterstrichene Produkt in der Summierung wird nun als Flächeninhalt eines orientierten Rechteckes, mit Seiten fi und pi - X), interpretiert:
Fi= fi*(pi - X) ,
Satz 1:
Die Summe der Flächenmomente zwischen den (gewicht.) Punkten einer Punktfolge und ihrem Schwer- oder Mittelpunkt ist Null.
unendl.(stetige) Pkt.-Folgen:
{ (f1,a),(f2,b) } sei Punktfolge im R1, also fi, a, b reell.
Dann nehmen wir eine schrittweise Teilung des Intervall d=(b-a) sodass sich X in der n-ten Teilungsstufe wie folgt ergibt:
Sum(k: f(k+1)*[a + k*d/n - X] ) =0 ,n>0 ;k=0,1,..n
In den Teilungsstufen ergeben sich folg. Pkt.Folgen:
n=2: {f1a+0, f2a+1*d/2 , f3a+2*d/2 } = {f1a , f2a+1*d/2 , f3b}
. . . . . . .
n=n: {f1a+0, f2a+1*d/2 , . . . , f(n+1)a+n*d/n } = {f1a , f2a+1*d/2 , . . . , f(n+1)b}
Sind alle fj const., z.B. =1, dann folgt:
Gl.2:
a*Sum(j: fj=1) +Sum(j: 1 * j*d/n) -Sum(j: 1)*X =0
Die Summier. von 1 ergibt (n+1), die Summier. von (j*d/n)
ergibt: 1/2*n²(n+1)*d/n ,
so daß sich aus Gl.2 zur Bestimmung von X ergibt:
a(n+1) +1/2*n²(n+1)*d/n -(n+1)*X=0
a +d/2 =X , diese Gl. für den Schwerpunkt ist unabhängig von dem Index "n" und somit auch für n→∞ gültig, also für unendl.virle Punkte zwischen a und b.
Jetzt ist noch zu zeigen, dass die bei der Teilung entstehenden unendl. vielen Punkte so dicht liegen, dass sie einer reellen Variablen zwischen a und b entsprechen.
Satz 2: ,
Gegeben Intervall (a-b)=d und ein reelles X , a<X<b.
Liegen in jeder δ-Umgebung Uδ(X) eines beliebigen Punktes X , a<X<b unendl.viele weitere Punkte Pi= a+i*d/n ,
Lim(i→∞: {Pi}) , um reelle Zahlen!
Beweis:
Uδ(X) bedeutet: abs(p-X)<δ ,δ>0 so vorgegeben, dass Uδ(X) ganz innerhalb des Intervalls (a,b) liegt.
Jetzt wird eine Teilung "n" so gewählt, dass (1/2n)*d<δ ist. Dann gibt es einen Index i, so dass die zwei Punkte:
Pi= a+(i/2n)*d und P(i+1)= a+((i+1)/2n)*d ,
Pik= a+(i/2n +1/2k )*d kleiner P(i+1) , für k>n .
a) P(i+1) -Pi = (i/2n +1/2n -i/2n)*d = d/2n <δ nach obiger Voraussetzung.
b) Für Folgepunkte Pik gilt Pik<P(i+1) :
a +(i/2n +1/2k)*d < a +(i/2n +1/2n)*d
=> 1/2k < 1/2n ,
c) Beim Grenzübergang k→∞ hat man unendl.viele (Folge)Punkte in der Uδ(X). Qed.
Diskrete Variable zu stetiger Variable:
1. Hat man eine diskrete Folge von Punkten, so betrachtet man jedes Intervall (Pi, Pi+1) ,
2. Werden die fi mit in den Grenzübergang einbezogen, so wird aus der diskreten Funktion f() einer diskreten Variablen, eine reelle Funktion f(x) einer reellen Variablen x, im Intervall a,b.
Beispiel für Mittelpunkt f(x) , a<x<b :
Die Summenformel für Schwerpkt.X, siehe Gl.1 stellt sich in diesem Kontext wie folgt dar:
(f0*0Δx +f1*1Δx +...+ fn*nΔx)
- (f0*1Δx +f1*1Δx +...+ fn*1Δx)*X =0
Im Grenzübergang werden die Faktoren 0,1,2,3,... ,die den Fortschritt der Punkte Pi darstellen, zur Variablen x mit den entspr. Funktionswerten f(x), so dass man die Summen umschreiben kann: Sum(n→∞, f(x)*x) und Sum(n→∞, f(x)).
Beide Summen stellen im Grenzübergang Δx→0, bestimmte Integrale dar:
∫[a→b, f(x)*x*dx] und ∫[a→b, f(x)*1*dx] .
Sind alle fi=const. z.B.=1 ,dann ist:
(1) ∫[a→b, 1*x*dx]= b²/2 -a²/2 und
(2) ∫[a→b, 1*1*dx]= (b-a)
Schwerpkt.X= (b² -a²)/2= (b+a)*(b-a)/2 -(b-a)*X =0
=> (b+a)*1/2 -1*X =0 => (a+b)/2 = X
6.2 Koordinaten-Transformation:
Begriffsbildung:
Elemente des Eukl.Raumes sind m-Tupel reeller Zahlen die einmal als Punkte oder als Richtungen von Null(0,...,0) aus gedeutet werden können. Symb: Rm ={p} ={(x1,...,xm)} ={(x1-0),...,(xm-0)} ,(Koord.-Schreibweise von Pkt. und Richtung)
Aus einem allg.Pkt. p=(x1,...,xm) ,alle xj≠0 kann für jede Koord. j eine Eins-Richtung ej= xj/Len(xj,0) für jede Koord. (siehe Kap."6.0 Ausgangspunkt"), gewonnen werden. Werden diese Basis-Richtungen in die Punkte-Darstellung mit einbezogen, erhält man in der Koord.Schreibweise für p:
p=(x1*e1,...,xm*em ) oder
p=(x1*e1 + ... +xm*em ) =L(x1,...,xm,E)
In der Lin.-Komb. L() stehen nun die xj als reelle Faktoren für die Basis-Richtungen ej
Viele Punkte pi, i=1..n , ergeben symb.:
pi = Li( pi , E) in Einzel-Schreibweise:
p1 = x1,1 *e1 + ... +x1,m *em)
. . . . . . . . .
pi = xi,1 *e1 + ... +xi,m *em)
. . . . . . . . .
pn = xn,1 *e1 + ... +xn,m *em)
Die Add. aller pi ergibt einen weiteren Pkt.,z.B. p, zusammengefaßt nach Koord.:
p=(a1..aj..am), Sum[i;xi,j)]*ej=a(j) , j=1...m
Interpretation:
1. Jedes beliebige Element, als m-Tupel oder als beliebige Lin.Komb. anderer Elemente, kann in eine normierte Lin.Komb. L() der Basis-Eins-Koord. ej transformiert /dargestellt werden!
2. m-Richtungen in norm.L()-Darstellung können unter bestimmten Anforderungen an die Koeff. a(i,j) als neue Koord.Basis verwandt werden.(Index i steht für die m-Richt. und Index j für
die m-Koord. in jeder der m-Richtungen)
m-Richtungen als Basis-Koord.:
Satz 1:
Die m-Richtungen bilden keine neue Koord.Basis, wenn sie paarweise durch Mult. mit einer reeller Zahl r ineinander überführt werden können! Symb:
non[ p(i)=r*p(j) ] oder p(i)≠r*p(j) ;∀i,j
Beweis:(indirekt)
Zum Beweis wird nur ein einziges Gegen-Beispiel benötigt. p1=(3,4) und p2=(21,28) sind in der Ebene zunächst 2 verschiedene Punkte, weil der Abstand d(p1,p2)≠0 ist.
Anderseits gilt: p2 =7*(3,4) =7*p1. Der weitere Punkt ( 1,2) läßt sich mit Lin.Komb.(p1,p2) nicht erreichen:
x*(3,4) + y*(21,28) = (1,2) ergibt Gl.System. 3x+21y=1 und 4x+28y=2
Aus Gl.2 folgt: y=(2-4x)/28 in Gl.1 y ersetzen:
==> Gl.1: 3*28x +21*(2 -4x) =1*28
==> Gl.1: 84x +42 -84x =28
==> Gl.1: 42 +0 =28 **Fehler
Fazit: Eine L(p1,p2) zu einem weitern Pkt. läßt sich nicht bilden, wegen p1=r*p2!
Ende des Beweises
Lineare Transformation /Abbildung:
Def.: Die lin.Komb.L() von Elementen p(i) ,i=1...n des Eukl.Raumes wird als "lineare Transformation" oder lineare Abbildung" bezeichnet.
Erläuterungen zur Def.:
a) Lin.Komb.L() sind zulässige axiomatische Verknüpfungen im Rm. Deshalb: Transformation eines oder mehrerer Elemente in ein anderes Element.
b) Gleichzeitig können die beteiligten Elemente der L() als Quell-Menge und das Ergebnis als Ziel-Menge/Element bezeichnet werden. Deshalb ist L() eine Abbildung in sich.
c) Bei der speziellen 'norm.lin.Komb.L()' besteht die Quell-Menge aus den {ej} ,j=1...m und die Ziel-Menge aus irgendeinem Punkt/Element.
d) Die lin.Komb.L() ist ein Polynom 1.Ordnung in den beteiligten Koeffizienten. Deshalb wird L() als lineare Abb. bezeichnet.
d) Die lineare Abb. besteht aus n-lin.Komb.L(), wenn die Ziel-Menge aus n-Elementen besteht, n=1,2,...
Koord.-Transformationen im R²:
Das Basis-System E={ej} besteht aus genau m-Eins-Richtungen. Durch m-lin.Komb. mit je allen ej erhält man eine lineare Abb. von m-Eins-Richtungen zu m-beliebigen Richtungen {p(j)}.
Speziell R²: Gl.2: p1 = a11*e1 +a12*e2 ; p2 = a21*e1 +a22*e2 .Damit {p1,p2} eine Basis bilden, müssen insbesondere die {e1,e2} jeweils als lin.Komb.L() von p1,p2 darstellbar sein.
Satz 2: In der reellen Folge {a(i,j)} ;i,j=1,2 muß die Bedingung gelten: (a(1,1)*a(2,1)-a(1,2)*a(2,1)) ≠0 , damit {p1,p2} Basis ist!
Beweis:
Gl.2 nach e1,e2 auflösen:
(1) a11*e1 +a12*e2 =p1
(2) a21*e1 +a22*e2 =p2, -a21*e1 ,dann /a22
----------
(1) a11*e1 +a12*e2 =p1
(2) e2=(p2 -a21*e1)/a22, e2 in Gl.(1) ersetzen
----------
(1) a11*e1 +a12*(p2 -a21*e1)/a22 =p1, nach e1 zusammenfassen
(1) (a11 -(a12*a21)/a22)*e1 +a12*p2/a22 =p1, a22 ausklammern
(1) (a11*a22 -a12*a21)*e1 +a12*p2 =p1*a22,a11*a22 -a12*a21 =D setzen
(1) e1= (p1*a22 -a12*p2)/D, e1 in Gl.(2) einsetzen
----------
(2) e2=(p2 -a21*(p1*a22 -a12*p2)/D) /a22,ausklammern
(2) e2=(p2*D -a21*a22*p1 -a21*a12*p2)/D) /a22,D einsetzen
(2) e2=(p2*a11 -a21*p1)/D
Ergeb: e1= (p1*a22 -a12*p2)/D
e2 =(p2*a11 -a21*p1)/D
Diese Form des Ergebnis heißt 'Kramersche Regel' und funktioniert nur wenn D≠0 ist.
Jetzt muß noch bewiesen werden, daß D=0 nur (genau) dann eintritt, wenn eine Richt.das Vielfache der anderen Richtung ist.
Nach Satz1 darf a1 nicht die gleiche Richtung, wie a2 haben, oder umgekehrt.
Sei a2=r*a1, dann a2=(r*a11,r*a12) in D einsetzen:
D: a11*r*a11 -a12*r*a12 =0 (Wenn 2 Richt. gleiche Richtung haben, ist D=0).
Umgekehrt gilt: a11*a22 -a12*a21 =0 ,umformen:
Gl.(3): a11*a22 = a12*a21 ,Skapro²(a1,a2) bilden:
(a11*a21 +a12*a22) * (a11*a21 +a12*a22)
= (a11²*a21² +a11²*a22² +a12²*a21² +a12²*a22²) ,Gl.(3):
= (a11²*a21² +a12²*a21² +a12²*a21² +a12²*a22²)
= (a11²*a21² +2*a12²*a21² +a12²*a22²) ,umformen:
= (a11²+ a11²)*(a21²+ a22²) ,=[Abs(a1)*Abs(a2)]²
==> Skapro²(a1,a2) =[Abs(a1)*Abs(a2)]² ,(Das gilt nur, wenn a1,a2 auf einer Geraden liegen, also a1=r*a2 ist. )
Ende des Beweises
Elemente des Eukl.Raumes sind m-Tupel reeller Zahlen die einmal als Punkte oder als Richtungen von Null(0,...,0) aus gedeutet werden können. Symb: Rm ={p} ={(x1,...,xm)} ={(x1-0),...,(xm-0)} ,
Aus einem allg.Pkt. p=(x1,...,xm) ,alle xj≠0 kann für jede Koord. j eine Eins-Richtung ej= xj/Len(xj,0) für jede Koord. (siehe Kap."6.0 Ausgangspunkt"), gewonnen werden. Werden diese Basis-Richtungen in die Punkte-Darstellung mit einbezogen, erhält man in der Koord.Schreibweise für p:
p=(x1*e1,...,xm*em ) oder
p=(x1*e1 + ... +xm*em ) =L(x1,...,xm,E)
In der Lin.-Komb. L() stehen nun die xj als reelle Faktoren für die Basis-Richtungen ej
Viele Punkte pi, i=1..n , ergeben symb.:
pi = Li( pi , E) in Einzel-Schreibweise:
p1 = x1,1 *e1 + ... +x1,m *em)
. . . . . . . . .
pi = xi,1 *e1 + ... +xi,m *em)
. . . . . . . . .
pn = xn,1 *e1 + ... +xn,m *em)
Die Add. aller pi ergibt einen weiteren Pkt.,z.B. p, zusammengefaßt nach Koord.:
Interpretation:
1. Jedes beliebige Element, als m-Tupel oder als beliebige Lin.Komb. anderer Elemente, kann in eine normierte Lin.Komb. L() der Basis-Eins-Koord. ej transformiert /dargestellt werden!
2. m-Richtungen in norm.L()-Darstellung können unter bestimmten Anforderungen an die Koeff. a(i,j) als neue Koord.Basis verwandt werden.
m-Richtungen als Basis-Koord.:
Satz 1:
Die m-Richtungen bilden keine neue Koord.Basis, wenn sie paarweise durch Mult. mit einer reeller Zahl r ineinander überführt werden können! Symb:
Beweis:
Zum Beweis wird nur ein einziges Gegen-Beispiel benötigt. p1=(3,4) und p2=(21,28) sind in der Ebene zunächst 2 verschiedene Punkte, weil der Abstand d(p1,p2)≠0 ist.
Anderseits gilt: p2 =7*(3,4) =7*p1. Der weitere Punkt ( 1,2) läßt sich mit Lin.Komb.(p1,p2) nicht erreichen:
x*(3,4) + y*(21,28) = (1,2) ergibt Gl.System. 3x+21y=1 und 4x+28y=2
Aus Gl.2 folgt: y=(2-4x)/28 in Gl.1 y ersetzen:
==> Gl.1: 3*28x +21*(2 -4x) =1*28
==> Gl.1: 84x +42 -84x =28
==> Gl.1: 42 +0 =28 **Fehler
Fazit: Eine L(p1,p2) zu einem weitern Pkt. läßt sich nicht bilden, wegen p1=r*p2!
Bemerkung:
Welche Bedingungen an die m² Koeff. xi,j in der norm.L() Darstellung der m-Richtungen zu stellen sind, damit sie eine Basis bilden, wird später untersucht!
Welche Bedingungen an die m² Koeff. xi,j in der norm.L() Darstellung der m-Richtungen zu stellen sind, damit sie eine Basis bilden, wird später untersucht!
Lineare Transformation /Abbildung:
Def.: Die lin.Komb.L() von Elementen p(i) ,i=1...n des Eukl.Raumes wird als "lineare Transformation" oder lineare Abbildung" bezeichnet.
Erläuterungen zur Def.:
a) Lin.Komb.L() sind zulässige axiomatische Verknüpfungen im Rm. Deshalb: Transformation eines oder mehrerer Elemente in ein anderes Element.
b) Gleichzeitig können die beteiligten Elemente der L() als Quell-Menge und das Ergebnis als Ziel-Menge/Element bezeichnet werden. Deshalb ist L() eine Abbildung in sich.
c) Bei der speziellen 'norm.lin.Komb.L()' besteht die Quell-Menge aus den {ej} ,j=1...m und die Ziel-Menge aus irgendeinem Punkt/Element.
d) Die lin.Komb.L() ist ein Polynom 1.Ordnung in den beteiligten Koeffizienten. Deshalb wird L() als lineare Abb. bezeichnet.
d) Die lineare Abb. besteht aus n-lin.Komb.L(), wenn die Ziel-Menge aus n-Elementen besteht, n=1,2,...
Koord.-Transformationen im R²:
Das Basis-System E={ej} besteht aus genau m-Eins-Richtungen. Durch m-lin.Komb. mit je allen ej erhält man eine lineare Abb. von m-Eins-Richtungen zu m-beliebigen Richtungen {p(j)}.
Speziell R²: Gl.2: p1 = a11*e1 +a12*e2 ; p2 = a21*e1 +a22*e2 .Damit {p1,p2} eine Basis bilden, müssen insbesondere die {e1,e2} jeweils als lin.Komb.L() von p1,p2 darstellbar sein.
Satz 2: In der reellen Folge {a(i,j)} ;i,j=1,2 muß die Bedingung gelten: (a(1,1)*a(2,1)-a(1,2)*a(2,1)) ≠0 , damit {p1,p2} Basis ist!
Beweis:
Gl.2 nach e1,e2 auflösen:
(1) a11*e1 +a12*e2 =p1
(2) a21*e1 +a22*e2 =p2
----------
(1) a11*e1 +a12*e2 =p1
(2) e2=(p2 -a21*e1)/a22
----------
(1) a11*e1 +a12*(p2 -a21*e1)/a22 =p1
(1) (a11 -(a12*a21)/a22)*e1 +a12*p2/a22 =p1
(1) (a11*a22 -a12*a21)*e1 +a12*p2 =p1*a22
(1) e1= (p1*a22 -a12*p2)/D
----------
(2) e2=(p2 -a21*(p1*a22 -a12*p2)/D) /a22
(2) e2=(p2*D -a21*a22*p1 -a21*a12*p2)/D) /a22
(2) e2=(p2*a11 -a21*p1)/D
Ergeb: e1= (p1*a22 -a12*p2)/D
e2 =(p2*a11 -a21*p1)/D
Diese Form des Ergebnis heißt 'Kramersche Regel' und funktioniert nur wenn D≠0 ist.
Jetzt muß noch bewiesen werden, daß D=0 nur (genau) dann eintritt, wenn eine Richt.das Vielfache der anderen Richtung ist.
Nach Satz1 darf a1 nicht die gleiche Richtung, wie a2 haben, oder umgekehrt.
Sei a2=r*a1, dann a2=(r*a11,r*a12) in D einsetzen:
D: a11*r*a11 -a12*r*a12 =0 (Wenn 2 Richt. gleiche Richtung haben, ist D=0).
Umgekehrt gilt: a11*a22 -a12*a21 =0 ,umformen:
Gl.(3): a11*a22 = a12*a21 ,Skapro²(a1,a2) bilden:
(a11*a21 +a12*a22) * (a11*a21 +a12*a22)
= (a11²*a21² +a11²*a22² +a12²*a21² +a12²*a22²) ,Gl.(3):
= (a11²*a21² +a12²*a21² +a12²*a21² +a12²*a22²)
= (a11²*a21² +2*a12²*a21² +a12²*a22²) ,umformen:
= (a11²+ a11²)*(a21²+ a22²) ,=[Abs(a1)*Abs(a2)]²
==> Skapro²(a1,a2) =[Abs(a1)*Abs(a2)]² ,(Das gilt nur, wenn a1,a2 auf einer Geraden liegen, also a1=r*a2 ist. )
6.3 Allg. Koordinaten-Transformation im Rm :
Die Koord. x1,x2,... sind zunächst nichts anderes als Punkte bzw. Zentral-Richtungen. Unter diesem Kontext
versteht man eine Koord.Trans. als m-dim Abb.F des linearen (x1,x2,...)-Raumes in einen ebenfalls linearen
(x1',x2',...)-Raumes. Anforderung an F():
- F() umkehrbar eindeut. Funktion des gesamt. Rm in sich
- Alle Fundamental-Folgen des Quell-Raumes werden in Fundamental-Bild-Folgen abgebildet:
{p(i)}->p ,dann gilt: {F(p(i))}->F(p) ,p,pi∈ Rm
Folgerung1: F() und F-1() sind stetig differenzierbar.
Folgerung2: F() =lineare Transf. , also:
p'= A*p ,A={ai,j} ,(A =m²-quadr.Matrizen reell.Zahlen), dann sind Anford.gegeben und alle part. Ableitungen der m-Lin.-Komb(),=Bild-Koord., nach den Quell-Koord. existieren und sind an jedem Pkt. des Raumes R constant, nämlich =ai,j.
Sachverhalt für nicht-lineares F():
Die Anford. an F() sind die gleichen, wie bei den Lin.-Transformationen. Unterschied sind die part.Ableitungen. Diese sind an jedem Pkt.des Raumes verschieden und selbst Funktionen der x1,x2,... :
F: {(x1..xm,x'1...x'm) , Fj(..xj..x'j..)=0 , j=1..m}
Erläuterungen:
Die m-Einschränkungen Fj() werden wegen Auflösungs-Theorie allg. implizit angegeben. Hier, bei unseren Koord.Transf., werden die Ziel-Koord. explizit als Funktionen der Quell-Koord. angegeben. Es existiert also i.a. bereits eine Auflösung in Richtung Quelle->Ziel:
x'j=fj(x1,...xm) ,j=1..m ,dann gilt:
F: {(..x..x'..) , Fj()=(...xj...fj...)=0 , j=1..m}
Um nach den Ziel-Koord. aufzulösen, werden für jedes fj die part.Abl. nach xi gebildet und ein lineares part.DGl.-System 1.Ordnung aufgestellt wie folgt:
F: {(x1..xm,y1...ym) , Fj(..xj..yj..)=0 , j=1..m}
yj=fj(x1,...xm) =>Fj: (yj - fj)=0
(Gl1): Dx(i)Fj() +Sum[j=1..k](Dy(i)Fj * Dx(i)fj )
Erläuterung zu (Gl1): Für jedes x(i) gibt es ein lin.Gl.System mit m-Gleichungen(j) zur Bestimmung von
- Dx(i)f1,. . ., Dx(i)fm
- Die m²-Koeff. der m-lin.Gl.Systeme (Gl1(i)) sind immer gleich, nämlich {Dy(i)Fj}. Daraus folgt für lineare F()-Funktionen part.Abl., die überall im Raum const. sind , und für nicht-lin. Funktionen part.Abl., die eine Funktion der Ort-Koord. im Raum darstellen. Die zugehörigen Determinanten sind bei lin.F() überall =const. und sonst eine sogenannte Funktional-Determinante, symb.: Det() =D(F1...Fm)/D(x1...xm)
Definition:
- Funktion() =Abb.von Elementen des Rm in den R1
- Funktional() =Abb.von Objecten des Rm in den R1
Bemerkung:
Die Behandlung über ein solches Gl.System klappt auch bei nicht-lin. funktionellen Zusammenhängen deshalb, weil die Differentiale Richtungen in die einzelnen Koord.-Funktionen darstellen, und die Richtungen selbst über Linear-Kombinationen mit einander verbunden werden (siehe auch totales Diff.).
Beispiel für Vorgehensweise an Hand lin.Koord.-Transf.,(lineares F()), in der Ebene:
a(1,1)*x +a(1,2)*y = u (F1=(-u + a11*x +a12*y)=0 )
a(2,1)*x +a(2,2)*y = v (F2=(-v + a21*x +a22*y)=0 )
u=u(x,y) , v=v(x,y), = lineare Funktionen von x,y
Vorbemerkungen:
1. Es handelt sich im Beispiel, abstrakt betrachtet, um eine eingeschränkte Abb. im R2+2. Zunächst sind die 4 reell. Variablen (x,y,u,v) unabhängig, bilden also einen kompletten 4-dim Raum ab. Durch die 2 Gleichungen u=f1(x,y) , v=f2(x,y), wird der R4 i.a. auf einen 2-dim Unterraum eingeschränkt. Dabei ist es egal, ob die zugehörigen Koord. des Unterraumes von (x,y);(x,u);(y,u);(u,y) usw. gebildet werden.
2. Für unsere Koord.Trans. ist nur entscheidend, daß die F1,F2 im gesamten Raum stetig differenzierbar sind nach allen Variablen.
Abb.F: {(x,y,u,v) , F1(x,y,f1,f2)=0 , F2(x,y,f1,f2)=0 }
Die Vorwärts-Auflösung ist gegeben, so daß wir hier rückwärts, nach x,y auflösen, unter Berücksichtigung, daß u,v jetzt unabhäng.Variablen sind und x=x(u,v) und y=y(u,v) Funktionen darstell.:
(1) DuF1 +DxF1* Df1x +DyF1* Df1y =0
(2) DuF2 +DxF2* Df1x +DyF2* Df1y =0
(1a) DvF1 +DxF1* Df2x +DyF1* Df2y =0
(2a) DvF2 +DxF2* Df2x +DyF2* Df2y =0
----------------------
DuF1= -1 , DuF2= 0 , DvF1 = 0 , DvF2= -1
(DxF1, DyF1, DxF2, DyF2) = (a11, a12, a21,a22)
(1)+(2) und (1a)+(2a) sind jeweils lin.Gl.Systeme zur Bestimmung der (fett)-Variablen(part.Abl.):
(1) -1 +a11* Df1x +a12* Df1y =0
(2) 0 +a21* Df1x +a22* Df1y =0
--------------D= a11*a22 -a12*a21 ---------
(1a) 0 +a11* Df2x +a12* Df2y =0
(2a) -1 +a21* Df2x +a22* Df2y =0
Lösung nach Kramer'scher Regel, siehe Abschnitt zuvor:
Df1x= (1*a22 -a12*0)/D = a22/D
Df1y =(0*a11 -a21*1)/D = -a21/D
Df2x= (0*a22 -a12*1)/D = -a12/D
Df2y =(1*a11 -a21*0)/D = a11/D
part.DGl. sind constant, daraus folgt:
x= a22/D *u -a12/D *v =( a22*u -a12*v)/D
y= -a21/D*u +a11/D*v =(-a21*u +a11v)/D
(partikuläre Lösungen werden zusammengewfaßt! , Ende Beispiel)
Im folgenden Abschnitt wird das gleiche Beispiel für ein nicht lin. F() im R2+2 durchgerechnet (Polar-Koord.-Transformation).
- F() umkehrbar eindeut. Funktion des gesamt. Rm in sich
- Alle Fundamental-Folgen des Quell-Raumes werden in Fundamental-Bild-Folgen abgebildet:
{p(i)}->p ,dann gilt: {F(p(i))}->F(p) ,p,pi∈ Rm
Folgerung1: F() und F-1() sind stetig differenzierbar.
Folgerung2: F() =lineare Transf. , also:
p'= A*p ,A={ai,j} ,(A =m²-quadr.Matrizen reell.Zahlen), dann sind Anford.gegeben und alle part. Ableitungen der m-Lin.-Komb(),=Bild-Koord., nach den Quell-Koord. existieren und sind an jedem Pkt. des Raumes R constant, nämlich =ai,j.
Sachverhalt für nicht-lineares F():
Die Anford. an F() sind die gleichen, wie bei den Lin.-Transformationen. Unterschied sind die part.Ableitungen. Diese sind an jedem Pkt.des Raumes verschieden und selbst Funktionen der x1,x2,... :
F: {(x1..xm,x'1...x'm) , Fj(..xj..x'j..)=0 , j=1..m}
Erläuterungen:
Die m-Einschränkungen Fj() werden wegen Auflösungs-Theorie allg. implizit angegeben. Hier, bei unseren Koord.Transf., werden die Ziel-Koord. explizit als Funktionen der Quell-Koord. angegeben. Es existiert also i.a. bereits eine Auflösung in Richtung Quelle->Ziel:
x'j=fj(x1,...xm) ,j=1..m ,dann gilt:
F: {(..x..x'..) , Fj()=(...xj...fj...)=0 , j=1..m}
Um nach den Ziel-Koord. aufzulösen, werden für jedes fj die part.Abl. nach xi gebildet und ein lineares part.DGl.-System 1.Ordnung aufgestellt wie folgt:
F: {(x1..xm,y1...ym) , Fj(..xj..yj..)=0 , j=1..m}
yj=fj(x1,...xm) =>Fj: (yj - fj)=0
(Gl1): Dx(i)Fj() +Sum[j=1..k](Dy(i)Fj * Dx(i)fj )
Erläuterung zu (Gl1): Für jedes x(i) gibt es ein lin.Gl.System mit m-Gleichungen(j) zur Bestimmung von
- Dx(i)f1,. . ., Dx(i)fm
- Die m²-Koeff. der m-lin.Gl.Systeme (Gl1(i)) sind immer gleich, nämlich {Dy(i)Fj}. Daraus folgt für lineare F()-Funktionen part.Abl., die überall im Raum const. sind , und für nicht-lin. Funktionen part.Abl., die eine Funktion der Ort-Koord. im Raum darstellen. Die zugehörigen Determinanten sind bei lin.F() überall =const. und sonst eine sogenannte Funktional-Determinante, symb.: Det() =D(F1...Fm)/D(x1...xm)
Definition:
- Funktion() =Abb.von Elementen des Rm in den R1
- Funktional() =Abb.von Objecten des Rm in den R1
Bemerkung:
Die Behandlung über ein solches Gl.System klappt auch bei nicht-lin. funktionellen Zusammenhängen deshalb, weil die Differentiale Richtungen in die einzelnen Koord.-Funktionen darstellen, und die Richtungen selbst über Linear-Kombinationen mit einander verbunden werden (siehe auch totales Diff.).
Beispiel für Vorgehensweise an Hand lin.Koord.-Transf.,(lineares F()), in der Ebene:
a(1,1)*x +a(1,2)*y = u
a(2,1)*x +a(2,2)*y = v
u=u(x,y) , v=v(x,y)
Vorbemerkungen:
1. Es handelt sich im Beispiel, abstrakt betrachtet, um eine eingeschränkte Abb. im R2+2. Zunächst sind die 4 reell. Variablen (x,y,u,v) unabhängig, bilden also einen kompletten 4-dim Raum ab. Durch die 2 Gleichungen u=f1(x,y) , v=f2(x,y), wird der R4 i.a. auf einen 2-dim Unterraum eingeschränkt. Dabei ist es egal, ob die zugehörigen Koord. des Unterraumes von (x,y);(x,u);(y,u);(u,y) usw. gebildet werden.
2. Für unsere Koord.Trans. ist nur entscheidend, daß die F1,F2 im gesamten Raum stetig differenzierbar sind nach allen Variablen.
Abb.F: {(x,y,u,v) , F1(x,y,f1,f2)=0 , F2(x,y,f1,f2)=0 }
Die Vorwärts-Auflösung ist gegeben, so daß wir hier rückwärts, nach x,y auflösen, unter Berücksichtigung, daß u,v jetzt unabhäng.Variablen sind und x=x(u,v) und y=y(u,v) Funktionen darstell.:
(1) DuF1 +DxF1* Df1x +DyF1* Df1y =0
(2) DuF2 +DxF2* Df1x +DyF2* Df1y =0
(1a) DvF1 +DxF1* Df2x +DyF1* Df2y =0
(2a) DvF2 +DxF2* Df2x +DyF2* Df2y =0
----------------------
DuF1= -1 , DuF2= 0 , DvF1 = 0 , DvF2= -1
(DxF1, DyF1, DxF2, DyF2) = (a11, a12, a21,a22)
(1)+(2) und (1a)+(2a) sind jeweils lin.Gl.Systeme zur Bestimmung der (fett)-Variablen(part.Abl.):
(1) -1 +a11* Df1x +a12* Df1y =0
(2) 0 +a21* Df1x +a22* Df1y =0
--------------D= a11*a22 -a12*a21 ---------
(1a) 0 +a11* Df2x +a12* Df2y =0
(2a) -1 +a21* Df2x +a22* Df2y =0
Lösung nach Kramer'scher Regel, siehe Abschnitt zuvor:
Df1x= (1*a22 -a12*0)/D = a22/D
Df1y =(0*a11 -a21*1)/D = -a21/D
Df2x= (0*a22 -a12*1)/D = -a12/D
Df2y =(1*a11 -a21*0)/D = a11/D
part.DGl. sind constant, daraus folgt:
x= a22/D *u -a12/D *v =( a22*u -a12*v)/D
y= -a21/D*u +a11/D*v =(-a21*u +a11v)/D
Im folgenden Abschnitt wird das gleiche Beispiel für ein nicht lin. F() im R2+2 durchgerechnet (Polar-Koord.-Transformation).
6.4 Spezielle Koord.Transformation im R2 :
Beispiel "Polar-Koordinaten":
Polar Koord. werden i.a. durch die Rückwärts-Abbild. zu den karth.Koord. definiert:
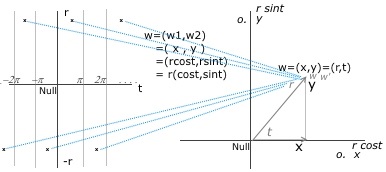
p=(x,y)= (r*cos(t), r*sin(t)) = r*(cos(t), sin(t))
Der allg.Punktes p wird jetzt als Zentral-Richtung w=(p-Null) gedeutet,mit folg. Eigenschaften:
- Richtung in der Ebene =Winkel zu x-Koord.
- Len(w) =±Länge von w auf Gerade (p,Null)
Beide Eigenschaften werden den unabhängigen reellen Zahlen t,r zugeordnet, so daß die zugehörige Abb.F im R2+2 lautet:
Abb.F: {(x,y,r,t) , (x -r*cos(t))=0, (y -r*sin(t))=0 }
Eigenschaften von F():
a) In der gegebenen Auflösung nach x=x(r,t) und y=y(r,t) erkennt man sofort , daß es sich um eine 1 zu 1 Abbildung handelt, d.h.,ist p=(x,y) und p'=(r,t), so sind diese Punkte identisch, wegen:
p-p' = (x-r*cost,y-r*sint) =(0,0)(wenn man für x,y = x(),y() einsetzt) .
b) Die lineare Abb. x=u und y=v ist ebenfalls eine 1 zu 1 Abbild. Später wird gezeigt, daß x=r*cos(t) und y=r*sin(t) die einzige nicht-lin.-(1 zu 1)-Koord.-Transformation in der Ebene ist
c) Betrachtet man die Abb.-Folge: (r,t) ->r*(f1,f2) ->(x,y) so fällt auf, daß f1,f2 =cos,sin zyklische Funktionen der reellen Variablen t sind, d.h. cos(-t)=cos(t) und -sin(-t)=sin(t). Der Zyklus-faktor ist 2pi.
Polar-Koordinaten:
Bild , Analysis1_1.jpg
Auflösung nach r=r(x,y) und t=t(x,y):
Abb.F: {(x,y,r,t) , (-x +r*cos(t))=0, (-y +r*sin(t))=0 }
(1) DxF1 +DrF1* Dxr +DtF1* Dxt =0
(2) DxF2 +DrF2* Dxr +DtF2* Dxt =0
(1a) DyF1 +DrF1* Dyr +DtF1* Dyt =0
(2a) DyF2 +DrF2* Dyr +DtF2* Dyt =0
----------------------
DxF1=-1 ; DxF2=0 ; DyF1=0 ; DyF2=-1
Funk.Det():
(a11) DrF1=cos(t) ; (a12) DtF1=-r*sin(t)
(a21) DrF2=sin(t) ; (a22) DtF2=r*cos(t)
D(a11a22-a12a21): r*(cos²(t) +sin²(t)) =r
-------lin.-part.-DGl.-------
(1) a11* Dxr +a12* Dxt =1
(2) a12* Dxr +a22* Dxt =0
(1a) a11* Dyr +a12* Dyt =0
(2a) a21* Dyr +a22* Dyt =1
----------------------
Lösung nach Kramer'scher Regel:
Dxr= (a22*1 -a12*0)/D = cos(t)
Dxt= (a11*0 -a21*1)/D =-sin(t)/r
Dyr= (a22*0 -a12*1)/D =-sin(t)
Dyt= (a11*1 -a21*0)/D = cos(t)/r
Ansatz: Es gilt (Dxr)² +(Dyr)² =1, setzt man r²=x²+y², so ergeben die part.Ableitungen:
(1): 2*r*Dxr =2x => (Dxr)²= x²/r²
(1a): 2*r*Dyr =2y => (Dyr)²= y²/r²
Werden beide Gleichungen addiert, so folgt: (x²+y²)/r² =1.
Dxt/Dyt = -sin(t)/cos(t) = -y/-x =y/x => t=arttan(y/x)
Ende Beispiel
Eigenschaften von cos(t) und sin(t):
1. f=cos(t), g=sin(t). Aus F= f²+g²=1 folgt:
DtF: 2*f*Dtf +2*g*Dtg =0 => f*Dtf = -g*Dtg
Durch Koeff.Vergleich folgt: Dtf =-g und Dtg= f ,also:
Dtcos(t)= -sin(t) und Dtsin(t)= cos(t)
2. Variable t beginnt bei 0 im Pkt.(1,0) => cos(0)=1 , sin(0)=0 . t folgt den Punkten auf der Kreislinie und gibt die Differenz-Bogenlänge d zwischen (1,0) und akt.Pkt.(x,y) in pos.Richtung wieder:
d= Bg((x,y) -(1,0)). Alle 2pi zeigt t wieder auf Anf.(1,0). Daraus folgt: Aus t kann man Anz.Umdrehungen ermitteln.
3. Beziehungen zwischen cos() und sin():
Bild , Analysis1_2.jpg
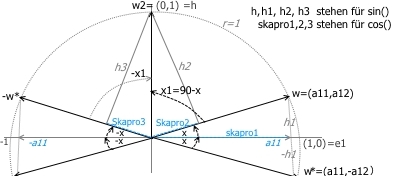
h1= (e1 x w)= (1*a12-0*a11)= a12= sin(x)
h= w2= (e1 x w2)= (1*1-0*0)= sin(90°)=1
h2= (w x w2)= (a11*1-a12*0)= a11= sin(x1)
h3= (-w* x w2)= (-a11*1 -a12*0)= -a11=sin(-x1)
[ h2,h3 ergeben: sin(-x1)= -sin(x1) ]
Skapro1= (e1*w)= 1*a11 +0*a12)= a11= cos(x)
Skapro2= (w*w2)= a11*0 +a12*1)= a12= cos(x1)
Skapro3= (-w* *w2)= (-a11*0 +a12*1)= a12= cos(-x1)
[ Skapro2,3 ergeben: cos(-x1)= cos(x1) ]
Durch ganze Drehung des Bildes (360°~ 2pi) ergibt sich wieder das Ausgangsbild. Daraus folgt:
cos() und sin() sind zykl.Funktionen mit Periode 2pi .
cos() und sin() sind ident.Funkt., nur um 90° versetzt:
sin(x) = cos(90-x) ; cos(x) = sin(90-x)
cos() ist gerade Funktion, wegen cos(-x1)= cos(x1)
sin() ist ungerade Funkt. , wegen sin(-x1)= -sin(x1)
Polar Koord. werden i.a. durch die Rückwärts-Abbild. zu den karth.Koord. definiert:
p=(x,y)= (r*cos(t), r*sin(t)) = r*(cos(t), sin(t))
Der allg.Punktes p wird jetzt als Zentral-Richtung w=(p-Null) gedeutet,mit folg. Eigenschaften:
- Richtung in der Ebene =Winkel zu x-Koord.
- Len(w) =±Länge von w auf Gerade (p,Null)
Beide Eigenschaften werden den unabhängigen reellen Zahlen t,r zugeordnet, so daß die zugehörige Abb.F im R2+2 lautet:
Abb.F: {(x,y,r,t) , (x -r*cos(t))=0, (y -r*sin(t))=0 }
Eigenschaften von F():
a) In der gegebenen Auflösung nach x=x(r,t) und y=y(r,t) erkennt man sofort , daß es sich um eine 1 zu 1 Abbildung handelt, d.h.,ist p=(x,y) und p'=(r,t), so sind diese Punkte identisch, wegen:
p-p' = (x-r*cost,y-r*sint) =(0,0)
b) Die lineare Abb. x=u und y=v ist ebenfalls eine 1 zu 1 Abbild. Später wird gezeigt, daß x=r*cos(t) und y=r*sin(t) die einzige nicht-lin.-(1 zu 1)-Koord.-Transformation in der Ebene ist
c) Betrachtet man die Abb.-Folge: (r,t) ->r*(f1,f2) ->(x,y) so fällt auf, daß f1,f2 =cos,sin zyklische Funktionen der reellen Variablen t sind, d.h. cos(-t)=cos(t) und -sin(-t)=sin(t). Der Zyklus-faktor ist 2pi.
Polar-Koordinaten:
Auflösung nach r=r(x,y) und t=t(x,y):
Abb.F: {(x,y,r,t) , (-x +r*cos(t))=0, (-y +r*sin(t))=0 }
(1) DxF1 +DrF1* Dxr +DtF1* Dxt =0
(2) DxF2 +DrF2* Dxr +DtF2* Dxt =0
(1a) DyF1 +DrF1* Dyr +DtF1* Dyt =0
(2a) DyF2 +DrF2* Dyr +DtF2* Dyt =0
----------------------
DxF1=-1 ; DxF2=0 ; DyF1=0 ; DyF2=-1
Funk.Det():
(a11) DrF1=cos(t) ; (a12) DtF1=-r*sin(t)
(a21) DrF2=sin(t) ; (a22) DtF2=r*cos(t)
D(a11a22-a12a21): r*(cos²(t) +sin²(t)) =r
-------lin.-part.-DGl.-------
(1) a11* Dxr +a12* Dxt =1
(2) a12* Dxr +a22* Dxt =0
(1a) a11* Dyr +a12* Dyt =0
(2a) a21* Dyr +a22* Dyt =1
----------------------
Lösung nach Kramer'scher Regel:
Dxr= (a22*1 -a12*0)/D = cos(t)
Dxt= (a11*0 -a21*1)/D =-sin(t)/r
Dyr= (a22*0 -a12*1)/D =-sin(t)
Dyt= (a11*1 -a21*0)/D = cos(t)/r
Ansatz: Es gilt (Dxr)² +(Dyr)² =1, setzt man r²=x²+y², so ergeben die part.Ableitungen:
(1): 2*r*Dxr =2x => (Dxr)²= x²/r²
(1a): 2*r*Dyr =2y => (Dyr)²= y²/r²
Werden beide Gleichungen addiert, so folgt: (x²+y²)/r² =1.
Dxt/Dyt = -sin(t)/cos(t) = -y/-x =y/x => t=arttan(y/x)
Eigenschaften von cos(t) und sin(t):
1. f=cos(t), g=sin(t). Aus F= f²+g²=1 folgt:
DtF: 2*f*Dtf +2*g*Dtg =0 => f*Dtf = -g*Dtg
Durch Koeff.Vergleich folgt: Dtf =-g und Dtg= f ,also:
Dtcos(t)= -sin(t) und Dtsin(t)= cos(t)
cos(t) und sin(t) sind beliebig oft stetig -differenzierbare Funktionen der reellen Variablen t .
2. Variable t beginnt bei 0 im Pkt.(1,0) => cos(0)=1 , sin(0)=0 . t folgt den Punkten auf der Kreislinie und gibt die Differenz-Bogenlänge d zwischen (1,0) und akt.Pkt.(x,y) in pos.Richtung wieder:
d= Bg((x,y) -(1,0)). Alle 2pi zeigt t wieder auf Anf.(1,0). Daraus folgt: Aus t kann man Anz.Umdrehungen ermitteln.
3. Beziehungen zwischen cos() und sin():
h1= (e1 x w)= (1*a12-0*a11)= a12= sin(x)
h= w2= (e1 x w2)= (1*1-0*0)= sin(90°)=1
h2= (w x w2)= (a11*1-a12*0)= a11= sin(x1)
h3= (-w* x w2)= (-a11*1 -a12*0)= -a11=sin(-x1)
Skapro1= (e1*w)= 1*a11 +0*a12)= a11= cos(x)
Skapro2= (w*w2)= a11*0 +a12*1)= a12= cos(x1)
Skapro3= (-w* *w2)= (-a11*0 +a12*1)= a12= cos(-x1)
Durch ganze Drehung des Bildes (360°~ 2pi) ergibt sich wieder das Ausgangsbild. Daraus folgt:
cos() und sin() sind zykl.Funktionen mit Periode 2pi .
cos() und sin() sind ident.Funkt., nur um 90° versetzt:
sin(x) = cos(90-x) ; cos(x) = sin(90-x)
cos() ist gerade Funktion, wegen cos(-x1)= cos(x1)
sin() ist ungerade Funkt. , wegen sin(-x1)= -sin(x1)
6.4a Add.Theoreme für cos() und sin():
Die wichtigen Add.Theoreme für cos(a±b) und sin(a±b) werden am folg. Bild erläutert:
Bild , Analysis1_2a.jpg

Bildauswertung:
Die Höhen h,h1 stehen im Eins-Kreis für den sin() der Zentralwinkel, die s,s1-Strecken = Abschnitte zwischen Höhen h,h1 und Pkt.Null für den cos() der Zentralwinkel. Die Höhen berechnen sich über die Flächen-Produkte F(), die Strecken s,s1 über die Skalarprodukte.
h= F(w* x w2)= (a11a22 +a21a12)= sin(x+x1)
= cos(x)sin(x1) +cos(x1)sin(x)
h1= F(w x w2)= (a11a22 -a21a12)= sin(x-x1)
= cos(x)sin(x1) -cos(x1)sin(x)
s,s1 =Skapro():
s= (w* *w2)= a11a21 -a12a22= cos(x+x1)
= cos(x)cos(x1) -sin(x1)sin(x1)
s1= (w * w2)= a11a21 +a12a22= cos(x-x1)
= cos(x)cos(x1) +sin(x1)sin(x1)
Bildauswertung:
Die Höhen h,h1 stehen im Eins-Kreis für den sin() der Zentralwinkel, die s,s1-Strecken = Abschnitte zwischen Höhen h,h1 und Pkt.Null für den cos() der Zentralwinkel. Die Höhen berechnen sich über die Flächen-Produkte F(), die Strecken s,s1 über die Skalarprodukte.
h= F(w* x w2)= (a11a22 +a21a12)= sin(x+x1)
= cos(x)sin(x1) +cos(x1)sin(x)
h1= F(w x w2)= (a11a22 -a21a12)= sin(x-x1)
= cos(x)sin(x1) -cos(x1)sin(x)
s,s1 =Skapro():
s= (w* *w2)= a11a21 -a12a22= cos(x+x1)
= cos(x)cos(x1) -sin(x1)sin(x1)
s1= (w * w2)= a11a21 +a12a22= cos(x-x1)
= cos(x)cos(x1) +sin(x1)sin(x1)
6.5 Funktionen/Potenz-Reihen :
1. Spez.Potenz-Reihen:
Im "Modell der reellen Zahlen ;Kap.3.3: Beispiele für konvergente Folgen" hatten wir Potenz-Reihen für reelle Zahlen x wie folgt gebildet:
Pn(x)= x0 +x1 +x² ... +xn Dies sind zunächst Polynome und man erhält die Summe zu: (xn+1 -x)/(x-1)
Beim Grenzübergang n->∞ erkennt man sofort, daß für Abs(x)≥1 P∞(x) nicht konvergiert, sondern nur für Abs(x)<1, dann ist Lim(xn)=0.
Satz1: Die Potenzreihe P(x)= x0 +x1 +x² +x³ + ... konvergiert für Abs(x)<1, der Grenzwert beträgt: x/(1-x) .
2. .Allg. Potenz-Reihen:
Setzt man für x=(a*x1), dann konvergiert:
(1) Pn(x1)= (a*x1)0 +(a*x1)1 +... +(a*x1)n , für n->∞, entspr. Pkt.1 zuvor ebenfalls nur für Abs(a*x1)<1 . Aus dieser Ungleichung erkennt man sofort, daß diese (Ungleichung) auch für weitere "x" gilt, nämlich: ∀x , Abs(x)<x1 .
Setzt man in Potenzreihe(1): aj=aj , j=0,1,2... ,so konvergiert P(x) für das vorgegebene x1, wenn Abs(a*x1)<1 ist, und damit für alle x: Abs(x)≤Ab(x1).
In diesem Kontext wird Ab(x1) als "Konvergenz-Radius r" einer Potenzreihe bezeichnet!
Def.: Die allg. Potenzreihe P(x)= a0x0 +a1x1 +a2x2 + ...
hat den Konv.Radius r, wenn Abs(a1/j)<(1/r) ist.
Beispiel: Sei aj=0.5j , dann folgt aus Abs(0.5*x)<1: x<0.5
Folgerung.: Die allg. Potenzreihe ist auch eine Funktion im offenen Intervall: -r<x<r
Folgerung.: Die allg. Potenzreihe wird von der Koeff.Folge {aj} eindeutig festgelegt. Das bedeutet: Über die Potenzreihen-Entwicklung einer Zahlen-Folge {aj}, j=0,1,2,... wird eine Funktion eindeutig bestimmt =abgebildet im Quell-Intervall Abs(x)<r.
Die Potenzreihen-Entwicklung ist deshalb ein Funktional, also Abbildung eines (Eukl.)Objektes in den Eukl.Zahl-Raum, und die Def. einer Funktion über eine P()-Entwicklung eine sogenannte Funktional-Gleichung.
Satz2: f(x) sei eine Funktionen-Reihe mit Koeff.Folge {aj} und Konv.Radius r und {áj} eine weitere Folge. Dann bildet die Potenzreihe: á0x0 +á1x1 +á2x2 + ... ebenfalls eine Funktionen-Reihe mit nicht kleinerem Konv.Radius r, wenn Abs(áj)<Abs(aj), ∀j ist.Beweis: Die Richtigkeit der Aussage leuchtet sofort ein.
Folgerung: Satz2 gilt auch für die Koeff.Folgen {áj} mit:
Abs(áj)=Abs(aj), ∀j j>m ,m natürliche Zahl.
Beweis: Für die ersten (m+1)-Summanden setzen wir: áj=(aj-bj) , j=0,1..m. Dann bilden wir die Funk.Reihen f und g:
f(x)= a0x0 +a1x1 +a2x2 +...
g(x)= (a0-b0)x0 + .... +(am-bm)xm
+ am+1xm+1 + am+2xm+2 + am+3xm+3 +...
= -(b0x0 + ... +bmxm)
+ a0x0 + a1x1 + a2x2 +...
g(x) aufspalten in: g(x)= g°(x) + f(x). Dann sind g°(x) die ersten (m+1)-Summanden und ergeben im gesamten Konv.Radius einen endlichen Wert: Abs(g°(x))≤k , k>0, ∀x Abs(x)<r .
So gilt: wenn f(x) konvergiert, dann konvergiert auch f(x)+k im gleichen Intervall.
Ende des Beweises
3. Stetigkeit von f im offenen Intervall:
f(x) konvergiert nur innerhalb des Konv.Radius, ist also auch nur hier, Abs(x)<r ,stetig.
Sei M ein kompaktes Intervall in U(r), also M⊂U(r).
Dann gilt für die Eigenschaften von f in M:
a) f ist beschränkt in M
b) zu jedem Pkt. x∈M gehört auch eine ganze Uδ(x) zu M. Wegen f=beschränkt gehört auch Uε(f(x)) zu M.
c) Damit wird jede Fundamental-Folge in Uδ(x) in eine entspr. Fundamental-Folge in Uε(f(x)) abbgebildet. Es können somit zu jedem Pkt.x∈M Differential-Quotienten Lim(Δf(x)/Δx ) ermittelt werden.
d) f ist in M beliebig oft differenzierbar.
Problem: Gibt es eine Folge {áj} deren Konv.Radius ≥r (r>0 beliebig) ist?
Lösung: Entspr. Folgerung zu Satz2 gilt: Jede Folge {á} ,deren Elemente ab einem Index m der Ungleichung: áj<aj , j>m genügen, ist die Folge mit beliebigen Konv.Radius r!
Satz3: {áj} , áj=1/Fak(j) ist die gesuchte Koeff.Folge.
Beweis: n!>an für n≥ a(a+1)
Zur genauen Beweisführung siehe Textblock am Kap.Ende!
4. Exponential-Funktion exp(x):
Die Funktionalgleichung der exp(x) -Funktion lautet:
exp(x)= ex = 1/0!*x0 +1/1!*x1 +1/2!*x2 +...
Der Konvergenz-Radius r umfaßt somit alle Konv.Radien aller mögl. Potenz-Reihen, r>0 beliebige reelle Zahl.
Bemerkung Der Konv.Radius bei Potenz-Entwicklungen Zyklischer Funktionen ist unendl.!
Die wichtigste Eigenschaft der exp() ist die DGl.: Dxexp(x)= exp(x).
5. Potenz-Reihen-Entwicklung:
Ist eine Funktion f(x) beliebig oft differenzierbar in einem Radius Abs(x)<r so kann man die Koeffizienten einer mögl.Potenzreihe wie folgt bestimmen:
f(x)= a0x0 +a1x1 +a2x2 +...
Die Ableitungen von f(x) nach x bezeichnen wir in der Folge symb.: f'(x)
Dann gilt: f(0)= a0, f'(0)= a1/1, f''(0)= a2/2, .....
und: f(x)= f(0)*x0 +f'(0)*x1 +f''(0)*x2 +...
Diese Form heißt: "MacLaurin'sche Form" der Potenzreihen-Entw.
Da die zykl Funktionen cos() und sin() ebenfalls unendl.mal differenzierbar sind, kann man für sie ähnliche Potenzreihen entwickeln.
Im "Modell der reellen Zahlen ;Kap.3.3: Beispiele für konvergente Folgen" hatten wir Potenz-Reihen für reelle Zahlen x wie folgt gebildet:
Pn(x)= x0 +x1 +x² ... +xn Dies sind zunächst Polynome und man erhält die Summe zu: (xn+1 -x)/(x-1)
Beim Grenzübergang n->∞ erkennt man sofort, daß für Abs(x)≥1 P∞(x) nicht konvergiert, sondern nur für Abs(x)<1, dann ist Lim(xn)=0.
Satz1: Die Potenzreihe P(x)= x0 +x1 +x² +x³ + ... konvergiert für Abs(x)<1, der Grenzwert beträgt: x/(1-x) .
2. .Allg. Potenz-Reihen:
Setzt man für x=(a*x1), dann konvergiert:
(1) Pn(x1)= (a*x1)0 +(a*x1)1 +... +(a*x1)n , für n->∞, entspr. Pkt.1 zuvor ebenfalls nur für Abs(a*x1)<1 . Aus dieser Ungleichung erkennt man sofort, daß diese (Ungleichung) auch für weitere "x" gilt, nämlich: ∀x , Abs(x)<x1 .
Setzt man in Potenzreihe(1): aj=aj , j=0,1,2... ,so konvergiert P(x) für das vorgegebene x1, wenn Abs(a*x1)<1 ist, und damit für alle x: Abs(x)≤Ab(x1).
In diesem Kontext wird Ab(x1) als "Konvergenz-Radius r" einer Potenzreihe bezeichnet!
Def.: Die allg. Potenzreihe P(x)= a0x0 +a1x1 +a2x2 + ...
hat den Konv.Radius r, wenn Abs(a1/j)<(1/r) ist.
Beispiel: Sei aj=0.5j , dann folgt aus Abs(0.5*x)<1: x<0.5
Folgerung.: Die allg. Potenzreihe ist auch eine Funktion im offenen Intervall: -r<x<r
Folgerung.: Die allg. Potenzreihe wird von der Koeff.Folge {aj} eindeutig festgelegt. Das bedeutet: Über die Potenzreihen-Entwicklung einer Zahlen-Folge {aj}, j=0,1,2,... wird eine Funktion eindeutig bestimmt =abgebildet im Quell-Intervall Abs(x)<r.
Die Potenzreihen-Entwicklung ist deshalb ein Funktional, also Abbildung eines (Eukl.)Objektes in den Eukl.Zahl-Raum, und die Def. einer Funktion über eine P()-Entwicklung eine sogenannte Funktional-Gleichung.
Satz2: f(x) sei eine Funktionen-Reihe mit Koeff.Folge {aj} und Konv.Radius r und {áj} eine weitere Folge. Dann bildet die Potenzreihe: á0x0 +á1x1 +á2x2 + ... ebenfalls eine Funktionen-Reihe mit nicht kleinerem Konv.Radius r, wenn Abs(áj)<Abs(aj), ∀j ist.
Folgerung: Satz2 gilt auch für die Koeff.Folgen {áj} mit:
Abs(áj)=Abs(aj), ∀j j>m ,m natürliche Zahl.
Beweis: Für die ersten (m+1)-Summanden setzen wir: áj=(aj-bj) , j=0,1..m. Dann bilden wir die Funk.Reihen f und g:
f(x)= a0x0 +a1x1 +a2x2 +...
g(x)= (a0-b0)x0 + .... +(am-bm)xm
+ am+1xm+1 + am+2xm+2 + am+3xm+3 +...
= -(b0x0 + ... +bmxm)
+ a0x0 + a1x1 + a2x2 +...
g(x) aufspalten in: g(x)= g°(x) + f(x). Dann sind g°(x) die ersten (m+1)-Summanden und ergeben im gesamten Konv.Radius einen endlichen Wert: Abs(g°(x))≤k , k>0, ∀x Abs(x)<r .
So gilt: wenn f(x) konvergiert, dann konvergiert auch f(x)+k im gleichen Intervall.
3. Stetigkeit von f im offenen Intervall:
f(x) konvergiert nur innerhalb des Konv.Radius, ist also auch nur hier, Abs(x)<r ,stetig.
Sei M ein kompaktes Intervall in U(r), also M⊂U(r).
Dann gilt für die Eigenschaften von f in M:
a) f ist beschränkt in M
b) zu jedem Pkt. x∈M gehört auch eine ganze Uδ(x) zu M. Wegen f=beschränkt gehört auch Uε(f(x)) zu M.
c) Damit wird jede Fundamental-Folge in Uδ(x) in eine entspr. Fundamental-Folge in Uε(f(x)) abbgebildet. Es können somit zu jedem Pkt.x∈M Differential-Quotienten Lim(Δf(x)/Δx ) ermittelt werden.
d) f ist in M beliebig oft differenzierbar.
Problem: Gibt es eine Folge {áj} deren Konv.Radius ≥r (r>0 beliebig) ist?
Lösung: Entspr. Folgerung zu Satz2 gilt: Jede Folge {á} ,deren Elemente ab einem Index m der Ungleichung: áj<aj , j>m genügen, ist die Folge mit beliebigen Konv.Radius r!
Satz3: {áj} , áj=1/Fak(j) ist die gesuchte Koeff.Folge.
Beweis: n!>an für n≥ a(a+1)
4. Exponential-Funktion exp(x):
Die Funktionalgleichung der exp(x) -Funktion lautet:
exp(x)= ex = 1/0!*x0 +1/1!*x1 +1/2!*x2 +...
Der Konvergenz-Radius r umfaßt somit alle Konv.Radien aller mögl. Potenz-Reihen, r>0 beliebige reelle Zahl.
Bemerkung Der Konv.Radius bei Potenz-Entwicklungen Zyklischer Funktionen ist unendl.!
Die wichtigste Eigenschaft der exp() ist die DGl.: Dxexp(x)= exp(x).
5. Potenz-Reihen-Entwicklung:
Ist eine Funktion f(x) beliebig oft differenzierbar in einem Radius Abs(x)<r so kann man die Koeffizienten einer mögl.Potenzreihe wie folgt bestimmen:
f(x)= a0x0 +a1x1 +a2x2 +...
Dann gilt: f(0)= a0, f'(0)= a1/1, f''(0)= a2/2, .....
und: f(x)= f(0)*x0 +f'(0)*x1 +f''(0)*x2 +...
Diese Form heißt: "MacLaurin'sche Form" der Potenzreihen-Entw.
Da die zykl Funktionen cos() und sin() ebenfalls unendl.mal differenzierbar sind, kann man für sie ähnliche Potenzreihen entwickeln.
6.6 Potenz-Reihe für cos() und sin():
Für die Ableitungen von cos und sin gilt:
Dtcos(t)= -sin(t) und Dtsin(t)= cos(t)Siehe Kap.6.4 zuvor: 'Eigenschaften von cos(t) und sin(t)' !
Daraus können die Funktions-Werte im Pkt.0 ermittelt werden:
f1=cos(), f2=sin(), Ableit.im Pkt.0:
cos sin Tang.im Pkt
f1' 0 1 f1,f2 +0°
f2' -1 0 f1,f2 +90°
f3' 0 -1 f1,f2 +180°
f4' 1 0 f1,f2 +270°
----------------------------
f5' 0 1 f1,f2 +0°
f6' -1 0 f1,f2 +90°
... weiter wie oben
Daraus können jetzt die Koeff. für die Potenzreihe bestimmt werden:
cos sin
a0: 1/0! 0/0! (f0'(0))
a1: 0/1! 1/1! (f1'(0))
a2: -1/2! 0/2! (f2'(0))
a3: 0/3! -1/3! (f3'(0))
a4: 1/4! 0/4! (f4'(0))
a5,a6,a7,a8 wie a1,a2,a3,a4 usw.
Potenzreihe:
(1) cos= 1 +0*x1 -1/2!*x2 + 0*x3 + 1/4!*x4 +...
(2) sin= 0 +1*x1 +0/2!*x2 -1/3!*x3 +0/4!*x4 +...
Wir lösen uns jetzt vom (x,y)-Koord.System und gehen von einer unabhäng.reellen Variablen t aus. Die Menge M={t} ist äquivalent zu einem R1. Das zugehörige Eins-Element sei "e". Die Elemente p von M können wie folgt beschrieben werden:
p= (t)= tKoord.-Schreibweise
p= t*eRichtungs-Schreibweise
Die Funktional-Gleichungen für die Potenz-Entw. von t*e lauten:
w1= cos(te)= 1 +0*(te)1 -1/2!*(te)2 + 0*x3 ..
w2= sin(te)= 0 +1*(te)1 +0/2!*(te)2 -1/3!*(te)3 ..
Wenn man jetzt axiomatisch festlegt: e²=-1 und w1+w2 bildet, erhält man eine Potenz-Reihe für exp(t*e):
1 +1*(te)1 -1/2!*(te)2 -1/3!*(te)3
+1/4!*(te)4 +1/5!*(te)5 +...
= 1 +1*t1e +1/2!*(t)2 +1/3!*(t)3e +1/4!*t4 +1/5!*t5e +1/6!*t6 +...
Die nicht unterstrichenen Summanden bilden die cos-Reihe, die unterstrichenen Summanden die Reihe: sin(t)*e
Def.: Um Verwechslungen mit den normalen Eins-Elementen zu vermeiden, bezeichnet man "e" als "i" (i= imaginäre Einheit).
Folgerung: Zwischen Potenzreihen (1), (2) und (w1+w2) besteht folg. Beziehung:
cos(t) +i*sin(t)= exp(it)Funktional-Gleich. der komplexen Zahlen !
Bemerkung: Mit w=(w1,w2)= w1+i*w2= eit wird ein Element des R2 festgelegt, also eine Eins-Richtung um Pkt.Null w=(w-0), Abs(w)=1. "w" ist dabei ein Bild eines reellen Parameters t, der durch 2 Funktionen f1,f2 in 2 reelle Ziel-Variable w1=f1(t), w2=f2(t) transformiert wird:
{(t,r,w1,w2) F= f1²+f2²-r²=0, f1(t),f2(t) }. Hier ist f1,f2 mit r mult.
Dies ist eine Abb. im R2+2, deren Einschränkung als Bild-Menge eine 2-dim Kurve (Kreislinie) liefert, die durch die weitere reelle unabhängige Variable r durch den ganzen R² gezoomt wird.
Insgesamt stellt F() eine 1 zu 1 Abbild. des R² in sich dar, d.h., die Koord. (f1,f2) im äquivalenten kompl.R² sind wertmäßig die gleichen wie im reellen Zahlraum R²!
Folgerung: Beide Räume (reell.,kompl.) entstehen durch Funktionen von 2 reellen Quell-Variablen, symb.: t, s , ,wie folgt:
reell.R²: {(t,s, x,y) F=(f1,f2), z.B.: x=t,y=s}, f1,f2 identische Fkt.
kompl.R²: {(t,s, x,y) F= f1²+f2²-s²=0, f1(t),f2(t)}, f1,f2 zykl.Funkt. von t mit Kreisfrequenz 2pi.
Die Umkehr-Funktionen sind dabei nur im reell.R² eindeutig (identisch). Im kompl.R² nur eindeutig bezüglich einer ±Windungszahl (Vielfaches von 2pi). Die Windungszahl wird dabei durch die Quell-Variable t festgelegt.
Rückwärts, von kompl.->reell., kann nicht mehr auf die Windungszahl geschlossen werden.
Folgerung: Ist f2=0, z.B. durch t=0, mutieren die kompl.Zahlen zu reellen Zahlen. Das bedeutet, man kann zunächst nur mit einer Teilmenge von {w} rechnen (=axiomat.Verknüpfungen im R1).
Da die Zahlen w, wie auch reelle x, durch Potenzreihen beschrieben werden, mit denen man rechnen kann, liegt die Vermutung nahe, daß man auch mit allen Elementen (f1,f2) rechnen kann! Dies erfordert den Nachweis aller Verknüpfungen, wie sie im reellen Zahlraum möglich sind.
Def.: Mit w= exp(it) wird ein Element des R², also eine Eins-Richtung um Null, (w-0), Abs(w)=1, beschrieben.
Multipliziert man w mit einer reellen Zahl r, so dient r als Zoom-Faktor für w und erreicht damit jeden Punkt der Ebene, symb.: p=r*w ∈R². Zur Unterscheidung von p zu reell.Zahl schreiben wir statt p "z".
Dtcos(t)= -sin(t) und Dtsin(t)= cos(t)
Daraus können die Funktions-Werte im Pkt.0 ermittelt werden:
f1=cos(), f2=sin(), Ableit.im Pkt.0:
cos sin Tang.im Pkt
f1' 0 1 f1,f2 +0°
f2' -1 0 f1,f2 +90°
f3' 0 -1 f1,f2 +180°
f4' 1 0 f1,f2 +270°
----------------------------
f5' 0 1 f1,f2 +0°
f6' -1 0 f1,f2 +90°
... weiter wie oben
Daraus können jetzt die Koeff. für die Potenzreihe bestimmt werden:
cos sin
a0: 1/0! 0/0! (f0'(0))
a1: 0/1! 1/1! (f1'(0))
a2: -1/2! 0/2! (f2'(0))
a3: 0/3! -1/3! (f3'(0))
a4: 1/4! 0/4! (f4'(0))
a5,a6,a7,a8 wie a1,a2,a3,a4 usw.
Potenzreihe:
(1) cos= 1 +0*x1 -1/2!*x2 + 0*x3 + 1/4!*x4 +...
(2) sin= 0 +1*x1 +0/2!*x2 -1/3!*x3 +0/4!*x4 +...
Wir lösen uns jetzt vom (x,y)-Koord.System und gehen von einer unabhäng.reellen Variablen t aus. Die Menge M={t} ist äquivalent zu einem R1. Das zugehörige Eins-Element sei "e". Die Elemente p von M können wie folgt beschrieben werden:
p= (t)= t
p= t*e
Die Funktional-Gleichungen für die Potenz-Entw. von t*e lauten:
w1= cos(te)= 1 +0*(te)1 -1/2!*(te)2 + 0*x3 ..
w2= sin(te)= 0 +1*(te)1 +0/2!*(te)2 -1/3!*(te)3 ..
Wenn man jetzt axiomatisch festlegt: e²=-1 und w1+w2 bildet, erhält man eine Potenz-Reihe für exp(t*e):
= 1 +1*t1e +1/2!*(t)2 +1/3!*(t)3e +1/4!*t4 +1/5!*t5e +1/6!*t6 +...
Die nicht unterstrichenen Summanden bilden die cos-Reihe, die unterstrichenen Summanden die Reihe: sin(t)*e
Def.: Um Verwechslungen mit den normalen Eins-Elementen zu vermeiden, bezeichnet man "e" als "i" (i= imaginäre Einheit).
Folgerung: Zwischen Potenzreihen (1), (2) und (w1+w2) besteht folg. Beziehung:
cos(t) +i*sin(t)= exp(it)
Bemerkung: Mit w=(w1,w2)= w1+i*w2= eit wird ein Element des R2 festgelegt, also eine Eins-Richtung um Pkt.Null w=(w-0), Abs(w)=1. "w" ist dabei ein Bild eines reellen Parameters t, der durch 2 Funktionen f1,f2 in 2 reelle Ziel-Variable w1=f1(t), w2=f2(t) transformiert wird:
{(t,r,w1,w2) F= f1²+f2²-r²=0, f1(t),f2(t) }.
Dies ist eine Abb. im R2+2, deren Einschränkung als Bild-Menge eine 2-dim Kurve (Kreislinie) liefert, die durch die weitere reelle unabhängige Variable r durch den ganzen R² gezoomt wird.
Insgesamt stellt F() eine 1 zu 1 Abbild. des R² in sich dar, d.h., die Koord. (f1,f2) im äquivalenten kompl.R² sind wertmäßig die gleichen wie im reellen Zahlraum R²!
Folgerung: Beide Räume (reell.,kompl.) entstehen durch Funktionen von 2 reellen Quell-Variablen, symb.: t, s , ,wie folgt:
reell.R²: {(t,s, x,y) F=(f1,f2), z.B.: x=t,y=s}, f1,f2 identische Fkt.
kompl.R²: {(t,s, x,y) F= f1²+f2²-s²=0, f1(t),f2(t)}, f1,f2 zykl.Funkt. von t mit Kreisfrequenz 2pi.
Die Umkehr-Funktionen sind dabei nur im reell.R² eindeutig (identisch). Im kompl.R² nur eindeutig bezüglich einer ±Windungszahl (Vielfaches von 2pi). Die Windungszahl wird dabei durch die Quell-Variable t festgelegt.
Rückwärts, von kompl.->reell., kann nicht mehr auf die Windungszahl geschlossen werden.
Folgerung: Ist f2=0, z.B. durch t=0, mutieren die kompl.Zahlen zu reellen Zahlen. Das bedeutet, man kann zunächst nur mit einer Teilmenge von {w} rechnen (=axiomat.Verknüpfungen im R1).
Da die Zahlen w, wie auch reelle x, durch Potenzreihen beschrieben werden, mit denen man rechnen kann, liegt die Vermutung nahe, daß man auch mit allen Elementen (f1,f2) rechnen kann! Dies erfordert den Nachweis aller Verknüpfungen, wie sie im reellen Zahlraum möglich sind.
Def.: Mit w= exp(it) wird ein Element des R², also eine Eins-Richtung um Null, (w-0), Abs(w)=1, beschrieben.
Multipliziert man w mit einer reellen Zahl r, so dient r als Zoom-Faktor für w und erreicht damit jeden Punkt der Ebene, symb.: p=r*w ∈R². Zur Unterscheidung von p zu reell.Zahl schreiben wir statt p "z".
6.7 Rechnen mit komplexen Zahlen:
Die Menge der kompl.Zahlen {z} ist mit der Menge aller 2-Tupel reeller Zahlen {(x,y)} gleich, bezüglich
des Koord.Vergleiches eines Punktes p=(x,y) in beiden Mengen! Alle Elemente können über Potenzreihen beschrieben
werden.
Funktionalgleich. für z : cos(z) +i*sin(z)= eiz
eiz= eix*ei*iy = (cos(x)+i*sin(x)) * (cos(iy)+i*sin(iy))
= cos(x)cos(iy)-sin(x)sin(iy) + i (sin(x)cos(iy)+cos(x)sin(iy))
Nach Add.Theorem f. cos/sin 6.4a gilt:
cos(x)cos(iy)-sin(x)sin(iy) = cos(x+iy)
sin(x)cos(iy)+cos(x)sin(iy) = sin(x+iy)
zusammen also:
ei(x+iy)= cos(x+iy) +isin(x+iy)Beweis Ende
Verknüpfungen in {z} (kompl.Zahlen):
- Add./Sub. entspr. linearer Eigenschaft des R²
- Mult: z1*z2 , d1= Abs(z1), d2= Abs(z2)
=> z1= d1eit1, z2= d2eit2, z1z2= d1d2ei(t1+t2)
ei(t1+t2)= cos(t1+t2)+i*sin(t1+t2)
Nach Add.Theorem f. cos/sin 6.4a gilt:
= cos(t1)cos(t2) - sin(t1)sin(t2) +i (sin(t1)cos(t2) + cos(t1)sin(t2))
d1,d2 hinein multipl.:
= d1cos(t1)*d2cos(t2) - d1sin(t1)*d2sin(t2)
+i (d1sin(t1)*d2cos(t2)+ d1cos(t1)*d2sin(t2))
Die Faktoren sind Koord.von z1,z2:
=> x1x2 -y1y2 +i (y1x2 +x1y2)= z1*z2
- Div: z1/z2 , d1= Abs(z1), d2= Abs(z2)
=> z1/z2= d1/d2 ei(t1-t2)
Nach Anwendung der Add.Theorem für cos(a-b)/sin(a-b) 6.4a gilt für ei(t1-t2):
= cos(t1)cos(t2) + sin(t1)sin(t2) +i (sin(t1)cos(t2) - cos(t1)sin(t2))
d1*d2/d2*d2 hinein multipl.:
=1/d2² *d1cos(t1)*d2cos(t2) + d1sin(t1)*d2sin(t2)
+i (d1sin(t1)*d2cos(t2)- d1cos(t1)*d2sin(t2))
Die Faktoren sind Koord.von z1,z2:
=> 1/d2² *(x1x2 +y1y2 +i (y1x2 -x1y2) )= z1/z2
Die Verknüpfungen sind i.a. wieder kompl.Zahlen, so daß die Frage: "Wann ist die Add() und Mult() von z1,z2 eine reelle Zahl?" zu einer besonderen Zahl z* führt:
Add.: (x1+iy1)+(x2+iy2)= x1+x2 +i(y1+y2)
Mult: (x1+iy1)*(x2+iy2)= x1x2-y1y2 +i(y1x2+x1y2) oder:
: r1eit1*r2eit2= r1r2eit1+it2
=> wenn beide Zahlen im Im[] gleich sind, bis auf das Vz., dann ist das Ergebnis eine reelle Zahl!
Add.: y1=-y2 => = x1+x2 +i(y1-y1)= x1+x2 +i0
Mult: (y1x2+x1y2)=0 => y1x2=-x1y2 => y1=-x1y2/x2
: x1x2 +x1y2²/x2 +i0
Folgerung1: Ist x1=x2, dann liegen z1,z2 symmetrisch zur reellen Koord.Achse mit gleicher Len().
Add() ergibt 2x und Mult() x²+y².
Def.: Die zu einer kompl.Zahl symmetr. liegende Zahl mit gleicher Len() heißt: "konjugiert-kompl.Zahl", symb.: z*, wobei gilt: (z*)*=z .
Folgerung2: Rechnen mit z und seiner konj.kompl.Zahl z*:
z= x +iy , z*= x-iy
Mult: zz* = xx-y(-y) +i( x(-y) +yx) = x²+y²
= Skapro(z,z)= Len²(z)
Add: z+z*= x+x +i(y-y )= 2x .Umgekehrt kann man aus jeder reellen Zahl eine Kombination aus kompl. +konj. kompl.Zahl machen:
z=(a, b) => a= 1/2*(z+z*) !(Diese Umwandlung wird im Pkt.6.11:
"part. kompl. Diff.Quotienten der kompl.Funktion f bezuüglich 'z' bzw. 'z*'" genutzt)
Folgerung3: Es gibt genausoviele kompl.Zahlen, wie konj. kompl.Zahlen.
- Abstand zweier Zahlen d(z,z1):
d²(z,z1)= (z-z1)(z-z1)* ,ist insbesondere z.B. z1=0, dann ist d(z,0)= sqrt(zz*) die Länge der Richtung von Null->z oder Abs(z). (oder: reit *rei-t= r²)
- Koord. in Richtung z:
z= reit/r ist eine Eins-Richtung in Richtung z und könnte damit als eine erste Basis-Richtung e1° für {z} gelten. Die zweite Basis-Richtung e2° wird durch: Dteit= i*eit gebildet.
e1°= eit , e2°= i*eit
e1°= cost +i*sint , e2°= -sint +i*cost
Eigenschaften von (e1°,e1°):
- Skapro()= -cost*sint +sint*cost= 0Orthogonal
- F(e1°,e2°)= cos²t -(-)sin²t= 1Orthonormiert (Rechts-System)
Folgerung: Die Koord. sind bezügl. (e1,e2) oder (1,i) nicht fest, sondern bewegen sich mit der akt.Richtung von "z".
- Funktionen/Abbildungen in z:
Eine kompl.Funktion F() bildet den R² in den R² ab.
f1= Re[F], f2= Im[F], also F= f1+i*f2 :
{(z,u) F= f1 +i*f2, u1=f1(z), u2=f2(z) } ,F dreht, staucht o.verlängert die Richtungen der Ebene.
Spez.Fall: z=(t,r), f1²(t)+f2²(t) -r²=0 .Hier ist F=(f1,f2) eine (die) 1 zu 1 Abbildung der Ebenen-Punkte in sich.
Spez.Fall: z=(t,0), Hier bildet F= f1 +i*f2 eine reelle Variable in die kompl-Ebene ab.
Funktionalgleich. für z : cos(z) +i*sin(z)= eiz
= cos(x)cos(iy)-sin(x)sin(iy) + i (sin(x)cos(iy)+cos(x)sin(iy))
Nach Add.Theorem f. cos/sin 6.4a gilt:
cos(x)cos(iy)-sin(x)sin(iy) = cos(x+iy)
sin(x)cos(iy)+cos(x)sin(iy) = sin(x+iy)
zusammen also:
ei(x+iy)= cos(x+iy) +isin(x+iy)
Verknüpfungen in {z} (kompl.Zahlen):
- Add./Sub. entspr. linearer Eigenschaft des R²
- Mult: z1*z2 , d1= Abs(z1), d2= Abs(z2)
=> z1= d1eit1, z2= d2eit2, z1z2= d1d2ei(t1+t2)
ei(t1+t2)= cos(t1+t2)+i*sin(t1+t2)
Nach Add.Theorem f. cos/sin 6.4a gilt:
d1,d2 hinein multipl.:
+i (d1sin(t1)*d2cos(t2)+ d1cos(t1)*d2sin(t2))
Die Faktoren sind Koord.von z1,z2:
=> x1x2 -y1y2 +i (y1x2 +x1y2)= z1*z2
- Div: z1/z2 , d1= Abs(z1), d2= Abs(z2)
=> z1/z2= d1/d2 ei(t1-t2)
Nach Anwendung der Add.Theorem für cos(a-b)/sin(a-b) 6.4a gilt für ei(t1-t2):
d1*d2/d2*d2 hinein multipl.:
+i (d1sin(t1)*d2cos(t2)- d1cos(t1)*d2sin(t2))
Die Faktoren sind Koord.von z1,z2:
=> 1/d2² *(x1x2 +y1y2 +i (y1x2 -x1y2) )= z1/z2
Die Verknüpfungen sind i.a. wieder kompl.Zahlen, so daß die Frage: "Wann ist die Add() und Mult() von z1,z2 eine reelle Zahl?" zu einer besonderen Zahl z* führt:
Mult: (x1+iy1)*(x2+iy2)= x1x2-y1y2 +i(y1x2+x1y2) oder:
: r1eit1*r2eit2= r1r2eit1+it2
=> wenn beide Zahlen im Im[] gleich sind, bis auf das Vz., dann ist das Ergebnis eine reelle Zahl!
Add.: y1=-y2 => = x1+x2 +i(y1-y1)= x1+x2 +i0
Mult: (y1x2+x1y2)=0 => y1x2=-x1y2 => y1=-x1y2/x2
: x1x2 +x1y2²/x2 +i0
Folgerung1: Ist x1=x2, dann liegen z1,z2 symmetrisch zur reellen Koord.Achse mit gleicher Len().
Add() ergibt 2x und Mult() x²+y².
Def.: Die zu einer kompl.Zahl symmetr. liegende Zahl mit gleicher Len() heißt: "konjugiert-kompl.Zahl", symb.: z*, wobei gilt: (z*)*=z .
Folgerung2: Rechnen mit z und seiner konj.kompl.Zahl z*:
z= x +iy , z*= x-iy
Mult: zz* = xx-y(-y) +i( x(-y) +yx) = x²+y²
= Skapro(z,z)= Len²(z)
Add: z+z*= x+x +i(y-y )= 2x .Umgekehrt kann man aus jeder reellen Zahl eine Kombination aus kompl. +konj. kompl.Zahl machen:
z=(a, b) => a= 1/2*(z+z*) !
Folgerung3: Es gibt genausoviele kompl.Zahlen, wie konj. kompl.Zahlen.
- Abstand zweier Zahlen d(z,z1):
d²(z,z1)= (z-z1)(z-z1)* ,ist insbesondere z.B. z1=0, dann ist d(z,0)= sqrt(zz*) die Länge der Richtung von Null->z oder Abs(z). (oder: reit *rei-t= r²)
- Koord. in Richtung z:
z= reit/r ist eine Eins-Richtung in Richtung z und könnte damit als eine erste Basis-Richtung e1° für {z} gelten. Die zweite Basis-Richtung e2° wird durch: Dteit= i*eit gebildet.
e1°= eit , e2°= i*eit
e1°= cost +i*sint , e2°= -sint +i*cost
Eigenschaften von (e1°,e1°):
- Skapro()= -cost*sint +sint*cost= 0
- F(e1°,e2°)= cos²t -(-)sin²t= 1
Folgerung: Die Koord. sind bezügl. (e1,e2) oder (1,i) nicht fest, sondern bewegen sich mit der akt.Richtung von "z".
- Funktionen/Abbildungen in z:
Eine kompl.Funktion F() bildet den R² in den R² ab.
f1= Re[F], f2= Im[F], also F= f1+i*f2 :
{(z,u) F= f1 +i*f2, u1=f1(z), u2=f2(z) } ,F dreht, staucht o.verlängert die Richtungen der Ebene.
Spez.Fall: z=(t,r), f1²(t)+f2²(t) -r²=0 .Hier ist F=(f1,f2) eine (die) 1 zu 1 Abbildung der Ebenen-Punkte in sich.
Spez.Fall: z=(t,0), Hier bildet F= f1 +i*f2 eine reelle Variable in die kompl-Ebene ab.
6.8 Diff.Quotienten im Eukl.Raum:
Nachfolgend sei M kompaktes Intervall und C(n)(M) sei Menge der in M n-mal stetig
differenzierbaren Funktionen (differenzierbar nach Variablen-Koord.Richtungen in M).
D(n)f(x°)= f°n' sei n-te Ableitung von f in Pkt.x°.
Potenzreihen-Entw. diff.barer Funktionen:
x,x°∈M , f(x)=f(x)= a0(x-x°)0 +a1(x-x°)1 +...+an(x-x°)n
=> f ist Polynom und damit diff.bar u. somit f∈C(n)(M)
Nach Kap.6.5 zuvor können die Koeff. a(j) zu:
a(j)= 1/j!*f0n' bestimmt werden. =>
f(x)= 1/0!*f00'(x-x°)0 +1/1!*f01'(x-x°)1 +..
+1/(n-1)!*f0(n-1)'(x-x°)n-1 +
+1/n!*f(x~)n'(x-x~)n
Dies ist die Taylor'sche Form der Potenzreihen-Entw. x~ ist nach
Quotienten-Mittelwert-Satz existierender Zwischenwert in M .
1/n!*f(x~)n'(x-x~)n heißt Restglied n-ter Ordnung R(n).
Man könnte M auch hier als Umgebung von x° betrachten.
Beispiel:
f(x)= 1/(1+x) +x² , 0≤x≤2 , x°=1
D1f= -1/(1+x)²+2x , D2f= 2/(1+x)³+2 , D3f= -6/(1+x)4
f(1)= 3/2 , Df(1)= 7/4 , D²f(1)= 9/4 , D³f(1)= -6/16
P2()= 3/2 +7/4*(x-1) +9/4*(x-1)²
Abschätzung R(3):
Wegen 1+x≥1 ist 1/(1+x)≤1 und Abs(D3f)≤6
Abs(f-P2) ≤Restglied() ≤1/3!Abs(x-1)³ *6 =Abs(x-1)³
Ergeb.: wenn die x nahe bei x°=1 liegen, also z.B. ∀x: Abs(x-1)<0.01 , dann ist der Abstand von f zum Polynom P(2), für diese x, <0.01³.
Mittelwertsatz der Diff.-Rechnung:
2-Punkte-Gleichung einer Geraden:
f(x)-f(b)= (f(a)-f(b))/(a-b) *(x-b)=Gerade durch f(a) und f(b) , a,b∈M
Sei: Δf= f(a)-f(b) ,Δx= a-b .Dann ist Δf/Δx= k überall in M gleich, nämlich const. Dann gilt auch:
Lim(a->b; Δf/Δx)= f'(b)= k(Man kann also beliebige Grenzübergänge bilden in M )
f geht durch a,b, aber keine Gerade:
Satz1: f∈C(1)(M). Ist Df in einer Uδ(x°) ,x°∈M, const., dann ist Df in ganz M const., und somit lineare Funktion (auch f=const.).
Beweis(indirekt): Wenn das nicht stimmt, dann wäre der rechts-seitige Diff.Quotient und der
links-seitige Diff.Quotient in den Randpunkten der Umg.(x°) verschieden, also f in diesen Punkten
nicht differenzierbar, was aber im Widerspruch zu f∈C(1)(M) steht!
Satz2: Df()=k, in mind. 1 Punkt von M!
Beweis: 1. Ist f= linear, dann Qed.
2. Ist f(a)>f(b), dann a,b vertauschen (jetzt f(b)>=f(a)). Sei Df(a)=k1, Df(b)=k2:
a) Liegt k zwischen k1 und k2, dann OK, weil Df stetig von k1<->k2. Qed.
b) Sind k1,k2 < k oder >k , dann sei Df(x~)=k~ für a<x~<b . Angenommen, es gibt keinen Pkt.x~ mit Df(x~)>k o. <k, dann wäre f(x~) in Pkt.b <f(b) o. >f(b). Dies ist aber ein Fehler, da f(x~)=f(b) in x~=b sein muß! Also gibt es ein k1~ mit k1~>k o. k1~<k . Somit triit Fall 2a) ein, Qed.
Ende des Beweises
Beispiel zum Mittelwertsatz:
f=x³-2x, Df=3x²-2, a=2, b=4, f(a)=4, f(b)=56, Df(2)=10, Df(4)=46
(1) f(x)-f(b)= ((f(a)-f(b))/(a-b) *(x-b)2-Punkte-Geraden-Gl. durch f(a) und f(b)
Der Diff.Quotient: Δf=((f(a)-f(b))/(a-b)=k =-52/-2= 26 .
Anderseits ist das Näherungs-Polynom P1(f) (nach Taylor):
(2) f(x)-f(b)= Df(b) *(x-b) +Restglied
Gesucht wird ein Pkt. x~ mit Df(x~)= 3(x~)²-2=k =26
=> x~=sqrt(28/3)= 3,055 . Probe: Df(3.055)=25,99
Ende Beispiel
Def: Gl.(2) ist auch eine lineare Funktion und heißt "Linearisierung L(f) im Punkt (b,f(b)).
Im Beispiel hat L(f(x~)) den gleichen Anstieg wie Gerade (1), nämlich k=26, was dem Mittelwertsatz entspricht.
Partielle Diff.-Quotienten:
Jetzt sei f stetige Funktion in M={(x1,..xj...xm)} =Rm
Es wird die j-te Variable betrachtet, all anderen (m-1)-Variablen sind jetzt Parameter.
Def: Existiert der Diff.Quotient: Δf(...xj..)/Δxj in allen Punkten (...xj...), so heißt f(x1..xm) partiell differenzierbar in Richtung xj, symb: Djf.
Dabei gilt für den Grenzübergang h->0 in einem Punkt x° in Richtung-j:
f(... xj°+h ...)- f(x1°.... xm°)) /(xj -xj°)= Djf(x°)
Def: Der Zähler im Quotienten links wird allg.als Differential von f, symb.: Δjf (Richtung-j) und der Nenner als Differential in der xj-Variable Δxj bezeichnet. Den Diff.-Quotienten kann man auch als Quotient 2-Differentiale die in einem Pkt. zusammenhängen betrachten:
Δjf/Δxjf= Djf(x°)
Den Diff.Quotienten kann man wieder als Anstieg einer Geraden durch (x°,f(x°) werten, welche die Form einer 2-Punkte-Gl. hat: a=xj, b=xj°:
(3) f(x)-f(x°)= Djf(x°)*(xj -xj°)2-Punkte Geraden-Gl.
Gl.(3) ist Linearisierung von f in (x°,f(x°)), jetzt im Rm.
Totales Differential von f(x1,x2,...):
Das Prinzip wird an einer Abb.im R³ gezeigt:
Abb: {(x1,x2,z) F=(z-f(x1,x2))=0 }. Die Quell-Menge ist die Ebene mit 2-Basis-Richtungen in Richtung der Variablen x1,x2.
Gegeben seien 3 Punkte, p0,p1,p2. Differentiale sind Differenzen zwischen beliebigen Punkten, z.B. (p1-p0)=Δp1 oder (p2-p0)=Δp2.
Liegen die Differentiale in Richtung der Koord. {x1,x2}, werden sie symb.: Δx1 /Δx2 bezeichnet. Die Diff. (p1-p0) u.(p2-p0) in Koord.Schreibweise:
(p1-p0)= (x11, x12)- (x01, x02)
(p2-p0)= (x21, x22)- (x01, x02)
Liegen (p1-p0),(p2-p0) in Richtung x1,x2, dann sind die 2.Koord.gleich:
(p1-p0)= (x11-x01, x02-x02)
(p2-p0)= (x01-x01, x22-x02)
=> (p1-p0)= (x11-x01 , 0)= Δ1x ,=> x11= x01+ Δ1x
=> (p2-p0)= (0 , x22-x02)= Δ2x ,=> x22= x02+ Δ2x
(Δ1x, Δ2x sollen hier an p0 gedockt sein. )
Mit den Bildpunkten f(p0),f(p1),f(p2) können die korrespondierenden Bild-Differentiale Δ1f, Δ2f gebildet werden:
f(p1)-f(p0)= > f(x01+Δ1x , x02)- f(x01 , x02) = Δ1f
f(p2)-f(p0)= f(x01 , x02+Δ2x)- f(x01 , x02) = Δ2f
Δ1f, Δ2f sind die part.Bild.Diff. für die entspr. Quell-Richtungen (hier x1,x2).
Das Gesamt- oder totale Bild-Diff. Δf(Δ1x+Δ2x ) wäre dann:
Δf= f(x01+Δ1x , x02+Δ2x)- f(x01 , x02) Erweitern:
= [f(x01+Δ1x , x02+Δ2x) - f(x01 , x02+Δ2x) ] *Δ1x/Δ1x
+[f(x01 , x02+Δ2x) - f(x01 , x02) ] *Δ2x/Δ2x
=> Δf= D1f*Δ1x + D2f*Δ2xtotales Differential von f
D(n)f(x°)= f°n' sei n-te Ableitung von f in Pkt.x°.
Potenzreihen-Entw. diff.barer Funktionen:
x,x°∈M , f(x)=f(x)= a0(x-x°)0 +a1(x-x°)1 +...+an(x-x°)n
=> f ist Polynom und damit diff.bar u. somit f∈C(n)(M)
Nach Kap.6.5 zuvor können die Koeff. a(j) zu:
a(j)= 1/j!*f0n' bestimmt werden. =>
f(x)= 1/0!*f00'(x-x°)0 +1/1!*f01'(x-x°)1 +..
+1/(n-1)!*f0(n-1)'(x-x°)n-1 +
+1/n!*f(x~)n'(x-x~)n
1/n!*f(x~)n'(x-x~)n heißt Restglied n-ter Ordnung R(n).
Man könnte M auch hier als Umgebung von x° betrachten.
Beispiel:
f(x)= 1/(1+x) +x² , 0≤x≤2 , x°=1
D1f= -1/(1+x)²+2x , D2f= 2/(1+x)³+2 , D3f= -6/(1+x)4
f(1)= 3/2 , Df(1)= 7/4 , D²f(1)= 9/4 , D³f(1)= -6/16
P2()= 3/2 +7/4*(x-1) +9/4*(x-1)²
Abschätzung R(3):
Wegen 1+x≥1 ist 1/(1+x)≤1 und Abs(D3f)≤6
Abs(f-P2) ≤Restglied() ≤1/3!Abs(x-1)³ *6 =Abs(x-1)³
Ergeb.: wenn die x nahe bei x°=1 liegen, also z.B. ∀x: Abs(x-1)<0.01 , dann ist der Abstand von f zum Polynom P(2), für diese x, <0.01³.
Mittelwertsatz der Diff.-Rechnung:
2-Punkte-Gleichung einer Geraden:
f(x)-f(b)= (f(a)-f(b))/(a-b) *(x-b)
Sei: Δf= f(a)-f(b) ,Δx= a-b .Dann ist Δf/Δx= k überall in M gleich, nämlich const. Dann gilt auch:
Lim(a->b; Δf/Δx)= f'(b)= k
f geht durch a,b, aber keine Gerade:
Satz1: f∈C(1)(M). Ist Df in einer Uδ(x°) ,x°∈M, const., dann ist Df in ganz M const., und somit lineare Funktion (auch f=const.).
Satz2: Df()=k, in mind. 1 Punkt von M!
Beweis: 1. Ist f= linear, dann Qed.
2. Ist f(a)>f(b), dann a,b vertauschen (jetzt f(b)>=f(a)). Sei Df(a)=k1, Df(b)=k2:
a) Liegt k zwischen k1 und k2, dann OK, weil Df stetig von k1<->k2. Qed.
b) Sind k1,k2 < k oder >k , dann sei Df(x~)=k~ für a<x~<b . Angenommen, es gibt keinen Pkt.x~ mit Df(x~)>k o. <k, dann wäre f(x~) in Pkt.b <f(b) o. >f(b). Dies ist aber ein Fehler, da f(x~)=f(b) in x~=b sein muß! Also gibt es ein k1~ mit k1~>k o. k1~<k . Somit triit Fall 2a) ein, Qed.
Beispiel zum Mittelwertsatz:
f=x³-2x, Df=3x²-2, a=2, b=4, f(a)=4, f(b)=56, Df(2)=10, Df(4)=46
(1) f(x)-f(b)= ((f(a)-f(b))/(a-b) *(x-b)
Der Diff.Quotient: Δf=((f(a)-f(b))/(a-b)=k =-52/-2= 26 .
Anderseits ist das Näherungs-Polynom P1(f) (nach Taylor):
(2) f(x)-f(b)= Df(b) *(x-b) +Restglied
Gesucht wird ein Pkt. x~ mit Df(x~)= 3(x~)²-2=k =26
=> x~=sqrt(28/3)= 3,055 . Probe: Df(3.055)=25,99
Def: Gl.(2) ist auch eine lineare Funktion und heißt "Linearisierung L(f) im Punkt (b,f(b)).
Im Beispiel hat L(f(x~)) den gleichen Anstieg wie Gerade (1), nämlich k=26, was dem Mittelwertsatz entspricht.
Partielle Diff.-Quotienten:
Jetzt sei f stetige Funktion in M={(x1,..xj...xm)} =Rm
Es wird die j-te Variable betrachtet, all anderen (m-1)-Variablen sind jetzt Parameter.
Def: Existiert der Diff.Quotient: Δf(...xj..)/Δxj in allen Punkten (...xj...), so heißt f(x1..xm) partiell differenzierbar in Richtung xj, symb: Djf.
Dabei gilt für den Grenzübergang h->0 in einem Punkt x° in Richtung-j:
f(... xj°+h ...)- f(x1°.... xm°)) /(xj -xj°)= Djf(x°)
Def: Der Zähler im Quotienten links wird allg.als Differential von f, symb.: Δjf (Richtung-j) und der Nenner als Differential in der xj-Variable Δxj bezeichnet. Den Diff.-Quotienten kann man auch als Quotient 2-Differentiale die in einem Pkt. zusammenhängen betrachten:
Δjf/Δxjf= Djf(x°)
Den Diff.Quotienten kann man wieder als Anstieg einer Geraden durch (x°,f(x°) werten, welche die Form einer 2-Punkte-Gl. hat: a=xj, b=xj°:
(3) f(x)-f(x°)= Djf(x°)*(xj -xj°)
Gl.(3) ist Linearisierung von f in (x°,f(x°)), jetzt im Rm.
Totales Differential von f(x1,x2,...):
Das Prinzip wird an einer Abb.im R³ gezeigt:
Abb: {(x1,x2,z) F=(z-f(x1,x2))=0 }. Die Quell-Menge ist die Ebene mit 2-Basis-Richtungen in Richtung der Variablen x1,x2.
Gegeben seien 3 Punkte, p0,p1,p2. Differentiale sind Differenzen zwischen beliebigen Punkten, z.B. (p1-p0)=Δp1 oder (p2-p0)=Δp2.
Liegen die Differentiale in Richtung der Koord. {x1,x2}, werden sie symb.: Δx1 /Δx2 bezeichnet. Die Diff. (p1-p0) u.(p2-p0) in Koord.Schreibweise:
(p1-p0)= (x11, x12)- (x01, x02)
(p2-p0)= (x21, x22)- (x01, x02)
Liegen (p1-p0),(p2-p0) in Richtung x1,x2, dann sind die 2.Koord.gleich:
(p1-p0)= (x11-x01, x02-x02)
(p2-p0)= (x01-x01, x22-x02)
=> (p1-p0)= (x11-x01 , 0)= Δ1x ,=> x11= x01+ Δ1x
=> (p2-p0)= (0 , x22-x02)= Δ2x ,=> x22= x02+ Δ2x
(
Mit den Bildpunkten f(p0),f(p1),f(p2) können die korrespondierenden Bild-Differentiale Δ1f, Δ2f gebildet werden:
f(p1)-f(p0)= > f(x01+Δ1x , x02)- f(x01 , x02) = Δ1f
f(p2)-f(p0)= f(x01 , x02+Δ2x)- f(x01 , x02) = Δ2f
Δ1f, Δ2f sind die part.Bild.Diff. für die entspr. Quell-Richtungen (hier x1,x2).
Das Gesamt- oder totale Bild-Diff. Δf(Δ1x+Δ2x ) wäre dann:
Δf= f(x01+Δ1x , x02+Δ2x)- f(x01 , x02)
= [f(x01+Δ1x , x02+Δ2x) - f(x01 , x02+Δ2x) ] *Δ1x/Δ1x
+[f(x01 , x02+Δ2x) - f(x01 , x02) ] *Δ2x/Δ2x
=> Δf= D1f*Δ1x + D2f*Δ2x
6.9 Diff.Quotienten höherer Ordnung :
Menge {f} der stetig diff.baren Funktionen:
Δf/Δx= DfGrundform der Beziehung zwischen Diff.Quotienten u.Ableitung f
Δf= Df*Δxdirekte Relation zwischen Bild-und Quell-Differential.
Der Relationsfaktor ist die Ableitung von f am Quellpkt. "x", an dem auch
die Differentiale angedockt sind.
Die Ableit.höherer Ordnung werden iterativ def.:
g=Df, Δg= Dg*Δxin linken Term: "g" -> "f" ersetzen:
ΔΔf= Dg*Δxin rechtem Term: "Dg" -> "Df*Δx" ersetzen:
ΔΔf= DDf *Δx*ΔxSymb.: ΔΔ = Δ² , Δx*Δx = (Δx)² setzen:
Die Abl. einer Funktion g=Df ist 2.Ableitung der Funktion f:
Symb.: Δ²f = D²f *dx²
Abl. von f=f(x,y):
g= D(f(x,y))Δg als totales Diff. schreiben:
Δg= D1g*Δ1x + D2g*Δ2x"g" in rechtem Term durch totales Diff. Δf ersetzen:
= D1[ D1f*Δ1x + D2f*Δ2x] *Δ1x
+D2[ D1f*Δ1x + D2f*Δ2x] *Δ2xGlieder entspr. "Binom" zusammenfassen:
Δg= D1²f*Δ1x² +2*D1D2f*Δ1x*Δ2x +D2²f*Δ2x²
Satz von 'Schwarz':
Wegen der Verknüpfungen über Lin.-Komb. kann die Reihenfolge der part.Abl. vertauscht werden:
DkDjf = DjDkfDie Indexfolge bei mehrfach part.Abl. kann innerhalb vertauscht werden!
Potenzreihen-Entw. für f(x,y):
Sei (x,y)=(x1,x2), p0=(x1°,x2°), Δjx = (xj-xj°) ,j=1,2
Dann gilt für die a(j)*(x-x°)j= 1/j!*Djf0*(x-x°)j .
Im rechtem Term:
Djf0= ersetzen durch totales Diff. j-ter Ordnung
(x-x°)j= ersetzen durch Binom j-ter Ordnung
(j)-te Summanden:
(0)= 1/0!*D0f(x°)*(x-x°)0= 1
(1)= 1/1!*[ D1f(x°)*(x1-x1°) + D2f(x°)*(x2-x2°)]
(2)= 1/2!*[ D1²f(x°)*(x1-x1°)²
+ 2D1D2f(x°)*(x1-x1°)(x2-x2°)
+ D2²f(x°)*(x2-x2°)² ]
(3)= 1/3!*[ D1³f(x°)*(x1-x1°)³
+ 3D1²D2f(x°)*(x1-x1°)²(x2-x2°)
+ 3D1D2²f(x°)*(x1-x1°)(x2-x2°)²
+ D2³f(x°)*(x2-x2°)³ ]
(4) ...(n-1). Dies ist die Taylor-Form der Potenzreihe für f.
Im Restglied im (n)-Koeff. ist f(x=x~) ein Punkt, welcher auf der Verb.Linie zwischen x und x° liegt.
Def: Die durch die Koeff. (0)...(n-1) zuvor definierte Potenzreihe heißt: Näherungspolynom (n-1)-ter Ordnung Pn-1() für f zum Punkt x°.
Abschätzung der part.Abl.Komb. 3-ter Ordnung:
Abs(Dv1Dv2Dv3) ≤Kv1v2v3 , v(i)=1 oder 2
Beispiel: f=x14x2x1, D1³f=24x1, D2D1²f=0 ,
D2²D1f=0 , D2³f=0,
für {x, 0≤x≤2} gilt: K111=Abs(D1³f)≤24*2 ,
K211=K221=K222=0 .
Polynom umstellen:
f= Pn-1() +R(n)Rechte Seite erweitern:
f= Pn-1() +a(n)*(x-x°)n +[ R(n) - a(n)*(x-x°)n] =>
f= Pn() +[ R(n) - a(n)*(x-x°)n]Term in [] wird folgend abgeschätzt:
Abschätzung f-Pn():
v1....vn sei die Indexfolge der n-part.Abl. von f.
ε>0 vorgegeben, => ∃δε>0, so das gilt:
Abs(Dv1....vnf - Dv1....vnf(x°) ) <ε , ∀x∈Uδε(x°)
Daraus folgt für (f-Pn) :
Abs(f-Pn)< 1/n! *ε[ Sum( Abs(xv1-xv1°) *....*Abs(xvn-xvn°) ]
Beispiel:
Es sei zu f=x1+x2³, x'=(0,0) und x"=(1,2) der Pkt. x~ des Restgliedes zu bestimmen:
D1f=1, D2f=3x2², D1²f= D1D2f= D2D1f=0, D2²f=6x2
Verb.Strecke von p1-p2: x(t)=(t,2t), 0≤t≤1 .
Entwickl. f=P1() +R(2) zwischen Pkt. x",x':
f(x")= f(x') +1/1!*[D1f(x')*(x1"-x1') +D2f(x')*(x2"-x2')]
+ 1/2!* [ D1²f(x~) *(x1"-x1')² ]
+ 1/2!* [2D1D2f(x~)*(x1"-x1')(x2"-x2') ]
+ 1/2!* [ D2²f(x~) *(x2"-x2')² ]
x~(t~)=(t~,2t~), da alle 2.Abl.Null sind, bis auf D2²f(x~)=6*2*t~ , ergibt die Gesamt-Entw.:
f(x")= 1+2³=9, f(x')=0, x"-x'=(1-0,2-0), D2²f(x~) *(x2"-x2')²= 12(t~)*2² , Werte einsetzen:
9= 0 +1+0 +0+(0+0) +1/2!*12(t~)*4 Gl. nach t~ auflösen:
8= 24*t~, t~=1/3, x~=(t~,2t~)= (1/3, 2/3).
Bemerkung: In diesem Fall gibt es nur einen einzigen Pkt.x~, i.a. mehrere!
Beispiel:
f=x14+x1x2 .Es ist zum Pkt.x°=(1,1) das Näherungspolynom 2.Ordnung zu bestimmen:
D1f=4x1³+x2, D2f=x1, D1²f=12x1², D1D2f=1, D2²f=0, also:
f(x°)=2, D1f(x°)=5, D2f(x°)=1, D1²f(x°)=12, D1D2f(x°)=1, D2²f(x°)=0, Polynom(2):
Nachfolgend wird x1° durch 1 und x2° durch 1 ersetzt!
P2(x)= Pn(x1,x2)= 2 +
+1/1!*[5(x1-1) +1(x2-1)]
+1/2!*[ 12(x1-1)² +2*1(x1-1)(x2-1) +0*(x2-1)² ]
= 2 +5(x1-1) +(x2-1) +6(x1-1)² +2(x1-1)(x2-1)
Abschätzung mit 3.Abl.:
D1³f=24x1, D1D2²f= D1²D2f= D2³f=0
Für M={(x1,x2): 0≤x1≤2 ,(x2 hier egal) } gilt:
Abs(D1³f)≤ 24*2= 48= K111 , K211=0 ... usw.
Abs(f(-P2)≤ 1/3!*[K111(x1-1)³ +0...]=8(x1-1)³
Die Abschätzung hängt hier nur von x1 ab. Ist z.B. Abs(x1-x1°)=Abs(x1-1) <1/10 , so ist:
Abs(f(-P2)< 8/10³ .
Ende Beispiele
Δf/Δx= Df
Δf= Df*Δx
Die Ableit.höherer Ordnung werden iterativ def.:
g=Df, Δg= Dg*Δx
ΔΔf= Dg*Δx
ΔΔf= DDf *Δx*Δx
Die Abl. einer Funktion g=Df ist 2.Ableitung der Funktion f:
Symb.: Δ²f = D²f *dx²
Abl. von f=f(x,y):
g= D(f(x,y))
Δg= D1g*Δ1x + D2g*Δ2x
= D1[ D1f*Δ1x + D2f*Δ2x] *Δ1x
+D2[ D1f*Δ1x + D2f*Δ2x] *Δ2x
Δg= D1²f*Δ1x² +2*D1D2f*Δ1x*Δ2x +D2²f*Δ2x²
Satz von 'Schwarz':
Wegen der Verknüpfungen über Lin.-Komb. kann die Reihenfolge der part.Abl. vertauscht werden:
DkDjf = DjDkf
Potenzreihen-Entw. für f(x,y):
Sei (x,y)=(x1,x2), p0=(x1°,x2°), Δjx = (xj-xj°) ,j=1,2
Dann gilt für die a(j)*(x-x°)j= 1/j!*Djf0*(x-x°)j .
Im rechtem Term:
Djf0= ersetzen durch totales Diff. j-ter Ordnung
(x-x°)j= ersetzen durch Binom j-ter Ordnung
(j)-te Summanden:
(0)= 1/0!*D0f(x°)*(x-x°)0= 1
(1)= 1/1!*[ D1f(x°)*(x1-x1°) + D2f(x°)*(x2-x2°)]
(2)= 1/2!*[ D1²f(x°)*(x1-x1°)²
+ 2D1D2f(x°)*(x1-x1°)(x2-x2°)
+ D2²f(x°)*(x2-x2°)² ]
(3)= 1/3!*[ D1³f(x°)*(x1-x1°)³
+ 3D1²D2f(x°)*(x1-x1°)²(x2-x2°)
+ 3D1D2²f(x°)*(x1-x1°)(x2-x2°)²
+ D2³f(x°)*(x2-x2°)³ ]
(4) ...(n-1). Dies ist die Taylor-Form der Potenzreihe für f.
Im Restglied im (n)-Koeff. ist f(x=x~) ein Punkt, welcher auf der Verb.Linie zwischen x und x° liegt.
Def: Die durch die Koeff. (0)...(n-1) zuvor definierte Potenzreihe heißt: Näherungspolynom (n-1)-ter Ordnung Pn-1() für f zum Punkt x°.
Abschätzung der part.Abl.Komb. 3-ter Ordnung:
Abs(Dv1Dv2Dv3) ≤Kv1v2v3 , v(i)=1 oder 2
Polynom umstellen:
f= Pn-1() +R(n)
f= Pn-1() +a(n)*(x-x°)n +[ R(n) - a(n)*(x-x°)n] =>
f= Pn() +[ R(n) - a(n)*(x-x°)n]
Abschätzung f-Pn():
v1....vn sei die Indexfolge der n-part.Abl. von f.
ε>0 vorgegeben, => ∃δε>0, so das gilt:
Abs(Dv1....vnf - Dv1....vnf(x°) ) <ε , ∀x∈Uδε(x°)
Daraus folgt für (f-Pn) :
Abs(f-Pn)< 1/n! *ε[ Sum( Abs(xv1-xv1°) *....*Abs(xvn-xvn°) ]
Beispiel:
Es sei zu f=x1+x2³, x'=(0,0) und x"=(1,2) der Pkt. x~ des Restgliedes zu bestimmen:
D1f=1, D2f=3x2², D1²f= D1D2f= D2D1f=0, D2²f=6x2
Verb.Strecke von p1-p2: x(t)=(t,2t), 0≤t≤1 .
Entwickl. f=P1() +R(2) zwischen Pkt. x",x':
f(x")= f(x') +1/1!*[D1f(x')*(x1"-x1') +D2f(x')*(x2"-x2')]
+ 1/2!* [ D1²f(x~) *(x1"-x1')² ]
+ 1/2!* [2D1D2f(x~)*(x1"-x1')(x2"-x2') ]
+ 1/2!* [ D2²f(x~) *(x2"-x2')² ]
x~(t~)=(t~,2t~), da alle 2.Abl.Null sind, bis auf D2²f(x~)=6*2*t~ , ergibt die Gesamt-Entw.:
f(x")= 1+2³=9, f(x')=0, x"-x'=(1-0,2-0), D2²f(x~) *(x2"-x2')²= 12(t~)*2² , Werte einsetzen:
9= 0 +1+0 +0+(0+0) +1/2!*12(t~)*4
8= 24*t~, t~=1/3, x~=(t~,2t~)= (1/3, 2/3).
Bemerkung: In diesem Fall gibt es nur einen einzigen Pkt.x~, i.a. mehrere!
Beispiel:
f=x14+x1x2 .Es ist zum Pkt.x°=(1,1) das Näherungspolynom 2.Ordnung zu bestimmen:
D1f=4x1³+x2, D2f=x1, D1²f=12x1², D1D2f=1, D2²f=0, also:
f(x°)=2, D1f(x°)=5, D2f(x°)=1, D1²f(x°)=12, D1D2f(x°)=1, D2²f(x°)=0, Polynom(2):
P2(x)= Pn(x1,x2)= 2 +
+1/1!*[5(x1-1) +1(x2-1)]
+1/2!*[ 12(x1-1)² +2*1(x1-1)(x2-1) +0*(x2-1)² ]
= 2 +5(x1-1) +(x2-1) +6(x1-1)² +2(x1-1)(x2-1)
Abschätzung mit 3.Abl.:
D1³f=24x1, D1D2²f= D1²D2f= D2³f=0
Für M={(x1,x2): 0≤x1≤2 ,
Abs(D1³f)≤ 24*2= 48= K111 , K211=0 ... usw.
Abs(f(-P2)≤ 1/3!*[K111(x1-1)³ +0...]=8(x1-1)³
Die Abschätzung hängt hier nur von x1 ab. Ist z.B. Abs(x1-x1°)=Abs(x1-1) <1/10 , so ist:
Abs(f(-P2)< 8/10³ .
6.10 Linearisierung von f in x° :
Voraussetzungen:
M°= offenes Intervall im Rm, z.B. a≤x≤b
f∈C(1)(M°), Menge aller in M° setig-diff.barer Funktionen
M⊂M°, M= kompaktes Intervall in M°
x°∈M, Punkt im kompakten Intervall, a<x<b
dann gilt:
Das Näherungspolynom P1(x)= f(x°) +Df(x°)(x-x°) heißt "Linearisierung" von f in x° .
Erläuterung:
P1() ist eine lineare Funktion über der Quell-Menge M, also eine Abbildung im Rm+1:
{(x,z): z= f(x°) +Df(x°)(x-x°) ,x∈Rm, z∈R1 }
Der Graph der Linearisierung heißt im:
R1+1: "Tangente" an f im Pkt. (x°,f(x°)) .
R2+1: "Tangential-Ebene" an f in(x°,f(x°) :
{(x1,x2,z): z= f(x°) +D1f(x°)(x1-x1°) +D2f(x°)(x2-x2°) }
R3+1: "Hyper-Ebene" an f im R(m+1)-1.
Beispiel R1+1:
Entsprechend Überlegungen aus vorigem Kapitel kann f-P1 auf 2 Arten abgeschätzt werden:
1. Abschätzung mit 2.Ableitung:
Abs(f-P1)≤ 1/2!*Abs[D²f(x~))*(x-x°)],
x∈Uδ(x°)= {x: Abs(x-x°)≤a },x~ durch x° ersetzen:
Abs(f-P1)≤ 1/2!*Abs(D²f(x°))*a²
2. Abschätzung in Linearisierung selbst:
f(x)= f(x°) +Df(x~)(x-x°) ,entspricht Mittelwertsatz
Rechte Seite erweitern:
f= f(x°) +Df(x°)(x-x°) +[Df(x~)) -Df(x°)] (x-x°)
Da Df stetig ist, wird der unterstrichene Term <ε bei x∈Uδ(ε)(x°).
Also gilt: Abs(f-P1)≤ ε*Abs(x-x°)
Anwendung Fehlerrechnung:
Wir betrachten eine Funktion y=f(x1,x2) in der Umgebung von x°=(x1°,x2°).
Ist x° nur ungefähr bestimmt, z.B. bei Messungen, so gilt für xj:
xj°-Δxj ≤ xj°+Δxj , weiter sei f(x)-f(x°)= Δy
Wird f in Δy durch P1 ersetzt, erhält man für Δy einen ungefähren Wert Δy~ :
Δy~ = P1(x) -f(x°)= Df(x°)(x-x°), 1-dim
= D1f(x°)(x1-x1°) +D2f(x°)(x2-x2°),2-dim
= D1f(x°)Δx1 +D2f(x°)Δx2 + ...,m-dim
Beispiel Erdbeschleunigung:
Die Erdbeschleunigung g steht für die Wechselwirkung zwischen Fallzeit t und Fallhöhe s, ist als eine Funktion y= f(s,t)= 2s/t² .
Gemessene Werte seien x°=(s°,t°), die Messfehler Δs, Δt. Es gilt:
y°= f(s°,t°)= 2s°/t°² ,Dsf(x°)= 2/t°² ,Dtf(x°)= -4*s°/t°³ , also:
Δy~ = 2/t°²Δs - 4*s°/t°³Δt =>
Abs(Δy~)≤ 2/t°²Δs +4*s°/t°³Δt , Δy~/y° = "Relativer Fehler, =>
Abs(Δy~/y°)≤ [ 2/t°²Δs + 4*s°/t°³Δt ] *2s°/t°² =>
Abs(Δy~/y°)≤ Δs/s° +2*Δt/t°
( Δs/s° ,Δt/t° =relative Fehler von s bzw. t)
Linearisierung komplexer Funktionen:
f= (f1,f2)= f1 +i*f2 , f1,f2 ∈C(1)(M)
Als Quell-Mengen kommen:
1. M= kompaktes Intervall auf t-Achse (R1),
2. M= offene Menge in (kompl.) z-Ebene.
Linearisierung zu 1. :
Linearisierung f1~,f2~ von f1,f2 im Pkt. t° :
(1) fj~(t)= fj(t°) +Dfj(t°)(t-t°) , j=1,2
f~(t)= f1(t°)+if2(t°) +[ Df1(t°)+iDf2(t°) ](t-t°)Koord.Form
Def: Df(t°)= Df1(t°)+iDf2(t°) heißt: Differentialquotient der kompl.Funktion f bezügl. der reellen Variablen t im Pkt. t°.
Denn: Gl.(1) rückwärts Δfj/(t-t°) , j=1,2:
Lim((t°->t)fj~(t)- fj(t°)]/(t-t°) =Dfj(t) , j=1,2
Linearisierung f~ von f im Pkt. t° :
(1) f~(t)= f(t°) +Df(t°)(t-t°)kompl. Form
Beispiel:
M= {t: 0≤t≤1}, f(t)= t² +it³, Df(t)= 2t +3it².
Satz 1: Besitzen f,g in t° Diff.Quotienten Df,Dg, so gilt dasselbe auch für:
D(f±g) = Df ± Dg
D(f*g) = Df*g +f*Dg
D(f/g) = (Df*g -f*Dg)/g²
Beispiel:
Linearisierung in kompl.Form für "1 zu 1" -Abbildung der Ebene:
M= {t: f(z)=z, z= r*exp(it), r=Param. fest}Graph ist Kreislinie(r)
Bild , Analysis1_3.jpg
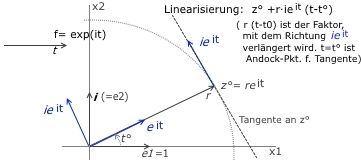
{exp(it), i*exp(it)} sind neue (karth.) Basis-Koord. der Ebene, (Siehe Kap. 6.7 Rechnen mit komplexen Zahlen, Absatz: 'Koord. in Richtung z').
Bei kompl.Funktionen einer reellen Variablen, in geometr. Assoziierung mit Newton-Raum, geben sie die Kurven-/Linien-Richtung an, z.B. bei Bewegungen von Körpern: Bahn-Geschw., -Beschl., Zentrifugal/-pedal-Kräfte etc.
M°= offenes Intervall im Rm
f∈C(1)(M°)
M⊂M°
x°∈M
dann gilt:
Das Näherungspolynom P1(x)= f(x°) +Df(x°)(x-x°) heißt "Linearisierung" von f in x° .
Erläuterung:
P1() ist eine lineare Funktion über der Quell-Menge M, also eine Abbildung im Rm+1:
{(x,z): z= f(x°) +Df(x°)(x-x°) ,x∈Rm, z∈R1 }
Der Graph der Linearisierung heißt im:
R1+1: "Tangente" an f im Pkt. (x°,f(x°)) .
R2+1: "Tangential-Ebene" an f in(x°,f(x°) :
R3+1: "Hyper-Ebene" an f im R(m+1)-1.
Beispiel R1+1:
Entsprechend Überlegungen aus vorigem Kapitel kann f-P1 auf 2 Arten abgeschätzt werden:
1. Abschätzung mit 2.Ableitung:
Abs(f-P1)≤ 1/2!*Abs[D²f(x~))*(x-x°)],
x∈Uδ(x°)= {x: Abs(x-x°)≤a }
Abs(f-P1)≤ 1/2!*Abs(D²f(x°))*a²
2. Abschätzung in Linearisierung selbst:
f(x)= f(x°) +Df(x~)(x-x°)
Rechte Seite erweitern:
f= f(x°) +Df(x°)(x-x°) +[Df(x~)) -Df(x°)] (x-x°)
Da Df stetig ist, wird der unterstrichene Term <ε bei x∈Uδ(ε)(x°).
Also gilt: Abs(f-P1)≤ ε*Abs(x-x°)
Anwendung Fehlerrechnung:
Wir betrachten eine Funktion y=f(x1,x2) in der Umgebung von x°=(x1°,x2°).
Ist x° nur ungefähr bestimmt, z.B. bei Messungen, so gilt für xj:
xj°-Δxj ≤ xj°+Δxj , weiter sei f(x)-f(x°)= Δy
Wird f in Δy durch P1 ersetzt, erhält man für Δy einen ungefähren Wert Δy~ :
Δy~ = P1(x) -f(x°)= Df(x°)(x-x°)
= D1f(x°)(x1-x1°) +D2f(x°)(x2-x2°)
= D1f(x°)Δx1 +D2f(x°)Δx2 + ...
Beispiel Erdbeschleunigung:
Die Erdbeschleunigung g steht für die Wechselwirkung zwischen Fallzeit t und Fallhöhe s, ist als eine Funktion y= f(s,t)= 2s/t² .
Gemessene Werte seien x°=(s°,t°), die Messfehler Δs, Δt. Es gilt:
y°= f(s°,t°)= 2s°/t°² ,Dsf(x°)= 2/t°² ,Dtf(x°)= -4*s°/t°³ , also:
Δy~ = 2/t°²Δs - 4*s°/t°³Δt =>
Abs(Δy~)≤ 2/t°²Δs +4*s°/t°³Δt
Abs(Δy~/y°)≤ [ 2/t°²Δs + 4*s°/t°³Δt ] *2s°/t°² =>
Abs(Δy~/y°)≤ Δs/s° +2*Δt/t°
( Δs/s° ,Δt/t° =relative Fehler von s bzw. t)
Linearisierung komplexer Funktionen:
f= (f1,f2)= f1 +i*f2 , f1,f2 ∈C(1)(M)
Als Quell-Mengen kommen:
1. M= kompaktes Intervall auf t-Achse (R1),
2. M= offene Menge in (kompl.) z-Ebene.
Linearisierung zu 1. :
Linearisierung f1~,f2~ von f1,f2 im Pkt. t° :
(1) fj~(t)= fj(t°) +Dfj(t°)(t-t°) , j=1,2
f~(t)= f1(t°)+if2(t°) +[ Df1(t°)+iDf2(t°) ](t-t°)
Def: Df(t°)= Df1(t°)+iDf2(t°) heißt: Differentialquotient der kompl.Funktion f bezügl. der reellen Variablen t im Pkt. t°.
Denn: Gl.(1) rückwärts Δfj/(t-t°) , j=1,2:
Lim((t°->t)fj~(t)- fj(t°)]/(t-t°) =Dfj(t) , j=1,2
Linearisierung f~ von f im Pkt. t° :
(1) f~(t)= f(t°) +Df(t°)(t-t°)
Beispiel:
M= {t: 0≤t≤1}, f(t)= t² +it³, Df(t)= 2t +3it².
Satz 1: Besitzen f,g in t° Diff.Quotienten Df,Dg, so gilt dasselbe auch für:
D(f±g) = Df ± Dg
D(f*g) = Df*g +f*Dg
D(f/g) = (Df*g -f*Dg)/g²
Bemerkung:
Diese Verknüpfungen entspr. der 1-dim Diff.Rechnung, was nicht verwunderlich ist,
da mit kompl. Variablen, wie im Modell d. Reellen-Zahlen, gerechnet werden kann.
Siehe Kap.6.7 "Rechnen mit komplexen Zahlen"
Beispiel:
Linearisierung in kompl.Form für "1 zu 1" -Abbildung der Ebene:
M= {t: f(z)=z, z= r*exp(it), r=Param. fest}
{exp(it), i*exp(it)} sind neue (karth.) Basis-Koord. der Ebene, (Siehe Kap. 6.7 Rechnen mit komplexen Zahlen, Absatz: 'Koord. in Richtung z').
Bei kompl.Funktionen einer reellen Variablen, in geometr. Assoziierung mit Newton-Raum, geben sie die Kurven-/Linien-Richtung an, z.B. bei Bewegungen von Körpern: Bahn-Geschw., -Beschl., Zentrifugal/-pedal-Kräfte etc.
6.11 Linearisierung kompl. Funktionen f(x1,x2):
Das normale "*" kennzeichnet im Produkt das Mult.Zeichen.
Das hochgestellte °-Zeichen, soll einen festen Punkt/Zahl p0 kennzeichnen.
Im vorigen Kap.6.10 wurden kompl.Funktionen einer reellen Variablen durch lineare Funktionen (P1)(t)) approximiert. Jetzt ist die Quellmenge ein abgeschlossener Bereich in der Ebene:
z=x1+i*x2, f=(f1,f2)= f1(z) +i*f2(z), f1,f2∈C(1)(M°).
Bemerkung: f ist eine Abb. im R2+2, der Graph der Abb. eine allg. 2-dim Menge im Abb.Raum.
Es sei z°∈M°, z°= x01 +i*x01 fest gewählt. Die Linearisierungen f1~,f2~ von f1,f2 im Punkt z° lauten:
fj~(z)= fj(z°) +D1fj(z°)(x1-x01) +D2fj(z°)(x2-x02) , j=1,2
Die Diff.Quotienten sind hier part.Diff.Quotienten nach x1° bzw. x2°, zusammengefaßt als "z°" bezeichnet. Damit ergibt sich für die Linearisierung f~ von f:
f~(z)= f1~(z) +if2~(z)=
f1(z°) +D1f1(z°)(x1-x01) +D2f1(z°)(x2-x02)
+i*[ f2(z°) +D1f2(z°)(x1-x01) +D2f2(z°)(x2-x02) ]
f~(z)= f1(z°) +i* f2(z°)
+ [ D1f1(z°) +i*D1f2(z°) ]*(x1-x01)
+ [ D2f1(z°) +i*D2f2(z°) ]*(x2-x02)
Def: Die unterstrichenen Ausdrücke zuvor heißen: part.Diff.Quotienten von f nach x1,x2:
D1f(z°)= D1f1(z°) +i*D1f2(z°)
D2f(z°)= D2f1(z°) +i*D2f2(z°)
f~(z) umstellen:
Die Linearisierung im Pkt.z° ergibt sich dann zu:
f~(z)= f(z°) +D1f(z°)(x1-x01) +D2f(z°)(x2-x02)
Um aus (x1-x01) u. (x2-x02) "z-z°" zu machen:
x1-x01= 1/2[(z-z°)+(z-z°)*]= 1/2(z-z°) +1/2(z-z°)*
x2-x02= 1/2i[(z-z°)-(z-z°)*]= -i/2(z-z°) +i/2(z-z°)*
f~(z) jetzt schreiben:
f~(z)= f(z°)
+ 1/2*( D1f(z°) -iD2f(z°) )(z-z°)
+ 1/2*( D1f(z°) +iD2f(z°) )(z-z°)*
Die Koeff. vor der kompl.Zahl (z-z°) bzw. vor der konj. kompl.Zahl (z-z°)* heißen "part. kompl. Diff.Quotienten" der kompl.Funktion f bezuüglich "z" bzw. "z*".
Symb.: Dzf(z°) , Dz*f(z°)
(1) Dzf= 1/2*( D1f - iD2f)
(1a) Dz*f= 1/2*( D1f + iD2f)
Die Linearisierung lautet jetzt wie folgt:
f~(z)= f(z°) +Dzf(z°)(z-z°) +Dz*f(z°)(z-z°)* oder:
(2) f~(z) -f(z°)= Dzf(z°)(z-z°) +Dz*f(z°)(z-z°)*
Graph der Linearisierung:
R2+2: {(z,z*,w): w=f~(z,z*) } , w ist (2-dim) kompl. Bildraum.
Erläuterung:
Der Graph ist eine Hyper-Ebene im R4, die eine Lin.Komb. aus Bild der z-Ebene und Bild der z*-Ebene darstellt. D.h. eigentlich 4-Quell-Variablen, die paarweise zusammenhängen: (x1,x2,x1,-x2).
Um eine Übereinstimmung mit der reellen, 2-Dim-Taylorreihe,P1(x1,x2), zu bekommen, fordert man entweder Dz*f(z°)=0 oder Dzf(z°)=0. Dann kann man einen vergleichbaren "Mittelwertsatz" kompl. Abbild. wie folgt formulieren.
Mittelwertsatz kompl. Abbild.:
Existiert zu einer kompl. Abbildung f der Diff.Quotient Dzf(z°) im Pkt.z°, dann gilt Gl.(2):
f(z) -f(z°)= Dzf(z°)(z-z°) +0 ,wenn Dz*f(z°)=0 ist.
oder: [f(z) -f(z°)]/(z-z°) =Dzf(z°) , für ein z aus Uδ(z°)
Satz1: Existiert Lim [f(z)-f(z°)]/(z-z°) , ∀z° ∈M , dann ist f holomorph (siehe Unten) und es gilt:
Dzf(z)= Lim [f(z)-f(z°)]/(z-z°) , z<->z°
Bemerkung:
Satz1 gilt analog für "z*". Satz1 ist enorm wichtig für die Bildung von Fundamental-Folgen in z und f(z), so daß die entspr. Differentiale Δz und Δf einen Sinn ergeben mit Grenzübergängen Δf/Δz.
Satz1 gilt analog für "z*". Satz1 ist enorm wichtig für die Bildung von Fundamental-Folgen in z und f(z), so daß die entspr. Differentiale Δz und Δf einen Sinn ergeben mit Grenzübergängen Δf/Δz.
Satz 2: Besitzen f,g in z° den "part.kompl. Diff. Quotienten" Dz() , Dz*(), so gilt dasselbe auch für:
D(f±g) = Df ± Dg
D(f*g) = Df*g +f*Dg
D(f/g) = (Df*g -f*Dg)/g²
Beispiele:
a) f=const., so ist D1f(z)= D2f(z)= 0 und Dzf= Dz*f= 0
b) f= z= x1+ix2, D1f(z)=1, D2f(z)= i
Dz(z)= 1/2( 1 -i²)= 1,
Dz*f= 1/2( 1 +i²)= 0
c) f= z*= x1-ix2, D1f(z)=1, D2f(z)= -i
Dz(z*)= 1/2( 1 -i(-i))= 0,
Dz*f= 1/2( 1 +1)= 1
d) Dz(zn)= n*Dz(zn-1) , Dz*(z*)n= n*Dz*(z*)n-1
e) c0,c1,...,ck kompl. Konst., dann gilt für:
f(z,z*)= c0z0 +c1z + ...+ ckzk :
Dzf= 0 +(1*c1)z0 +(2c2)z + ...+ (k*ck)zk-1
Dz*f= 0 +0 +0 +...+0
f) Analog zu e) für Diff. z*:
f(z,z*)= c0z*0 +c1z* + ...+ ck(z*)k :
Dzf= 0 +0 +0 +...+0
Dz*f= 0 +(1*c1)z*0 +(2c2)z* + ...+ (k*ck)z*(k-1)
Def: Wenn die part. kompl. Diff. Quotienten Dzf und Dz*f überall im Quellgebiet M existieren, dann heißt:
f holomorph , wenn Dz*f(z,z*)= 0 , ∀z ∈M
f antiholomorph , wenn Dzf(z,z*)=Dzf(z,z*)= 0
Bemerkung:
Die Quell-Mengen M werden über die reelle Variable t (entspricht Zentral-Winkel) definiert. Dadurch sind auch die z* automatisch mit in M enthalten!
Die Funktionen in e) und f) sind holomorph bzw. antiholomorph in der ganzen Ebene.
f= zz* bringt bezügl. "holomorphie" keine Aussage, da es eine reelle Funktion ist: f= x²+y².
Die z-Ebene und die z*-Ebene gehen durch Vertauschung der Halbräume oberhalb und unterhalb der x1-Achse ineinander über!
Die Quell-Mengen M werden über die reelle Variable t (entspricht Zentral-Winkel) definiert. Dadurch sind auch die z* automatisch mit in M enthalten!
Die Funktionen in e) und f) sind holomorph bzw. antiholomorph in der ganzen Ebene.
f= zz* bringt bezügl. "holomorphie" keine Aussage, da es eine reelle Funktion ist: f= x²+y².
Die z-Ebene und die z*-Ebene gehen durch Vertauschung der Halbräume oberhalb und unterhalb der x1-Achse ineinander über!
Satz3: wegen Gl.(1),(1a) gilt für f:
f holomorph, dann: -i*D2f= D1f , => Dzf= D1f = -i*D2f
f antiholom., dann: i*D2f= D1f , => Dz*f= D1f = i*D2f
oder (part.Abl.):
f holom. : D1f1= D2f2 , D1f2= -D2f1
f antihol.: D1f1= -D2f2 , D1f2= D2f1
6.12 Kompl.Abl. in geometr. Assoziierung:
Differentiale in den verschied.Ebenen:
Wir gehen von der allg. Abbildung R2 ->R2 aus:
f= f1+i*f2= f1(x1+i*x2) +i*f2(x1+i*x2)
Die Differentiale der Quell-Ebene sind: Δx1, Δx2 und der Bild-Ebene: Δf1, Δf2. Alle Diff. sind an dem allg.Pkt. z°=(x1°,x2°), f(z°) angedockt.
Handelt es sich bei f1,f2 um stetig diff.bare Funktionen, so besitzen alle part. Diff. Quotienten Grenzwerte im allg.Pkt. z°:
(1) D1f1= Δf1/Δx1 , D1f2= Δf2/Δx1
(2) D2f1= Δf1/Δx2 , D2f2= Δf2/Δx2
Die 4 Diff.Quotienten sind reelle Zahlen und können in einer weiteren Ebene als 2 kompl. Zahlen dargestellt werden (D1f1 +i*D1f2) und (D2f1 +i*D2f2) .
1. kompl.Funktion einer Variablen:
Quelle: {x1=t, x2=0} f(t)= f1(t)+ i*f2(t) , 2 part.Abl.: Df1, Df2
Bild , Analysis1_4a.jpg
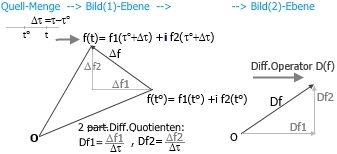
Δf1= f1(t°+Δt)-f1(t°) , Δf2= f2(t°+Δt)-f2(t°)
Die Diff.Quotienten sind reelle Zahlen, d.h., der Differential-Operator D() ist selbst eine ganz normale Abbild. in die Ebene (->Bild(2)).
2. kompl.Funktion zweier Variablen:
{(x1,x2): f= [f1(x1,x2),f2(x1,x2)] }
f1,f2 sind reelle Funktionen einer kompl.Variablen. f ist kompl. Re[f]= f1 ,Im[f]= f2
f kann holomorph, antiholomorph oder keines von Beiden sein.
Im nachf. Bild wird die Abb. des Diff.Operators D() einer kompl.Funktion f untersucht:
Bild , Analysis1_4.jpg
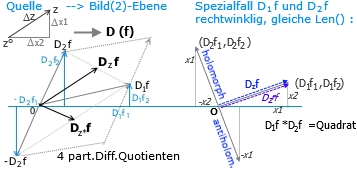
Die part.kompl.Diff.Quotienten (1) und (2) bilden Richtungen (D1f ,D2f) in der Ebene, die im Spezialfall der "holomorphie" bzw. "antiholom." von f im Rechten Winkel zueinander stehen, und die gleichen Längen haben.
Dann gilt: Dzf bzw. Dz*f = D1f1 +i*D1f2
(Wegen Satz3 aus Kap.6.11 zuvor)
Beweis:
Wir bezeichnen die D1-Richtung mit X1 und
die D2-Richtung mit X2. Dann gilt:
f holom. : x1,1=x2,2 , x1,2=-x2,1 =>
X1= (x1,1,x1,2) , X2= (-x1,2,x1,1)
f antihol.: x1,1=-x2,2 , x1,2=x2,1 =>
X1= (x1,1,x1,2) , X2= (x1,2,-x1,1)
(Die Vorzeichen ändern sich in X2)
d²(X1)= d²(X2)= x11² +x12²
Flächenprodukt F(X1,X2)= ±(x11² +x12²)
F(X)/d²(X)= ±d²(X)/d²(X)= ±1 = rechtwinklig, gl.Len,
Das neg-Vz. ergibt sich bei antiholom. f
Skapro(X1,X2)= x11*x12 - x11*x12= 0
Ende des Beweises
Wir gehen von der allg. Abbildung R2 ->R2 aus:
f= f1+i*f2= f1(x1+i*x2) +i*f2(x1+i*x2)
Die Differentiale der Quell-Ebene sind: Δx1, Δx2 und der Bild-Ebene: Δf1, Δf2. Alle Diff. sind an dem allg.Pkt. z°=(x1°,x2°), f(z°) angedockt.
Handelt es sich bei f1,f2 um stetig diff.bare Funktionen, so besitzen alle part. Diff. Quotienten Grenzwerte im allg.Pkt. z°:
(1) D1f1= Δf1/Δx1 , D1f2= Δf2/Δx1
(2) D2f1= Δf1/Δx2 , D2f2= Δf2/Δx2
Die 4 Diff.Quotienten sind reelle Zahlen und können in einer weiteren Ebene als 2 kompl. Zahlen dargestellt werden (D1f1 +i*D1f2) und (D2f1 +i*D2f2) .
1. kompl.Funktion einer Variablen:
Quelle: {x1=t, x2=0} f(t)= f1(t)+ i*f2(t) , 2 part.Abl.: Df1, Df2
Δf1= f1(t°+Δt)-f1(t°) , Δf2= f2(t°+Δt)-f2(t°)
Die Diff.Quotienten sind reelle Zahlen, d.h., der Differential-Operator D() ist selbst eine ganz normale Abbild. in die Ebene (->Bild(2)).
2. kompl.Funktion zweier Variablen:
{(x1,x2): f= [f1(x1,x2),f2(x1,x2)] }
f1,f2 sind reelle Funktionen einer kompl.Variablen. f ist kompl. Re[f]= f1 ,Im[f]= f2
f kann holomorph, antiholomorph oder keines von Beiden sein.
Im nachf. Bild wird die Abb. des Diff.Operators D() einer kompl.Funktion f untersucht:
Die part.kompl.Diff.Quotienten (1) und (2) bilden Richtungen (D1f ,D2f) in der Ebene, die im Spezialfall der "holomorphie" bzw. "antiholom." von f im Rechten Winkel zueinander stehen, und die gleichen Längen haben.
Dann gilt: Dzf bzw. Dz*f = D1f1 +i*D1f2
Beweis:
Wir bezeichnen die D1-Richtung mit X1 und
die D2-Richtung mit X2. Dann gilt:
f holom. : x1,1=x2,2 , x1,2=-x2,1 =>
X1= (x1,1,x1,2) , X2= (-x1,2,x1,1)
f antihol.: x1,1=-x2,2 , x1,2=x2,1 =>
X1= (x1,1,x1,2) , X2= (x1,2,-x1,1)
d²(X1)= d²(X2)= x11² +x12²
Flächenprodukt F(X1,X2)= ±(x11² +x12²)
F(X)/d²(X)= ±d²(X)/d²(X)= ±1
Das neg-Vz. ergibt sich bei antiholom. f
Skapro(X1,X2)= x11*x12 - x11*x12= 0
Bemerkung:
Nur bei "holomorphie" bzw. "antiholomorphie" besitzen die Funktionen die gleiche Verknüpfungs-Funktionalität, wie reelle Funktionen! Man kann also z.B. mit komplexen Potenzreihen approximieren.
Nur bei "holomorphie" bzw. "antiholomorphie" besitzen die Funktionen die gleiche Verknüpfungs-Funktionalität, wie reelle Funktionen! Man kann also z.B. mit komplexen Potenzreihen approximieren.
Weitere Betrachtungen:
Euklidische Geometrie ,
Modell der reellen Zahlen ,
analytische Geometrie I ,
analytische Geometrie II ,
Euklidischer Raum ,
Analysis 1, Abbildungen ,
kleinere Beispiele der Himmelsmechanik im Newton-Modell ,
Bewegungen im Newton-Raum ,